Celebration! “Return of Ultraman” 50th Anniversary
A compilation of the project to make soft vinyl monster dolls walk on batteries Vol.2
目次/Table of contents
No.6 space large monster “Bemstar"

This time, I will introduce Bemstar, the space monster that appeared in the 18th episode “Ultraseven is come!“
Contrary to its cute looks and cry, it is a space monster that is extremely strong and defeated Ultraman once. It is a popular monster of the second Ultra series.
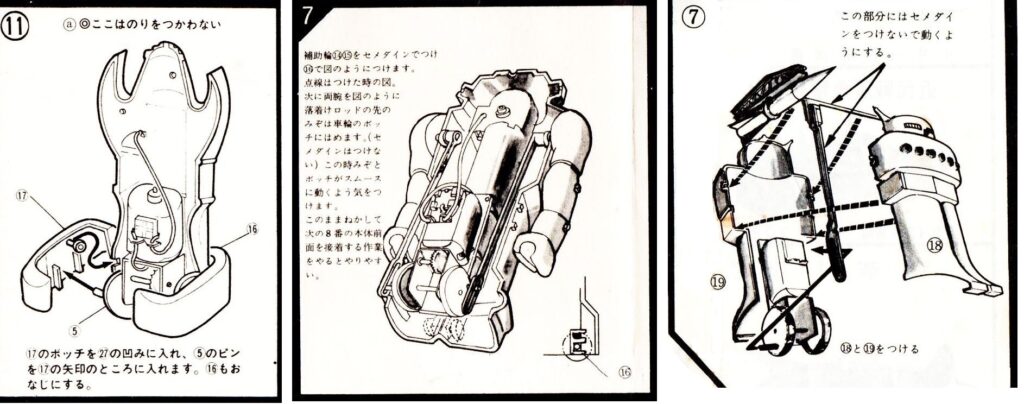
For electrification, I used a soft vinyl doll of the “Kaijūkyō" brand, which is a very well-made one. This time, I have adopted an orthodox walking style with an auxiliary rod, whose purpose is to prevent falls, on the sole of the foot . This style is called “Aoshima style" in this project. It swings its arms and walks with its mouth open and closed. Of course, you can also play the cry.


Photo-2 
Photo-3

Photo-4 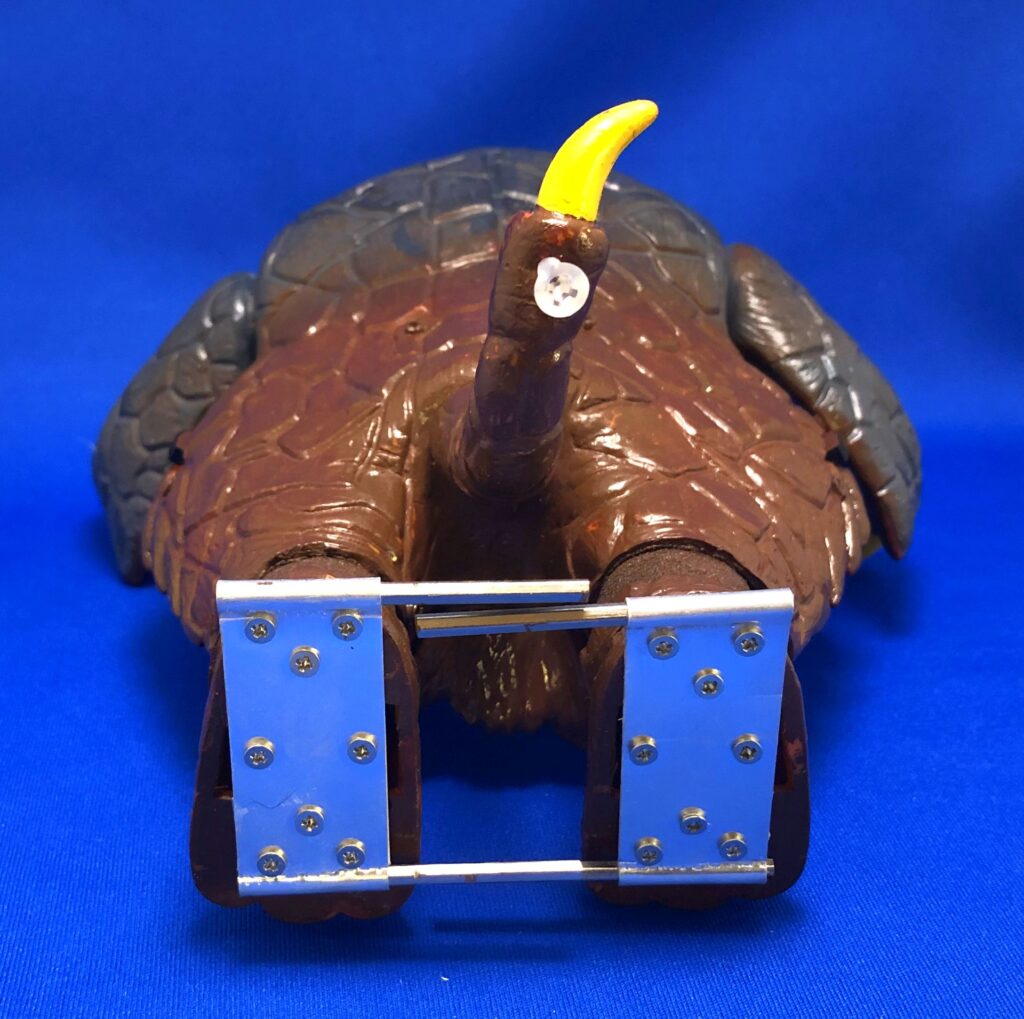
Photo-5
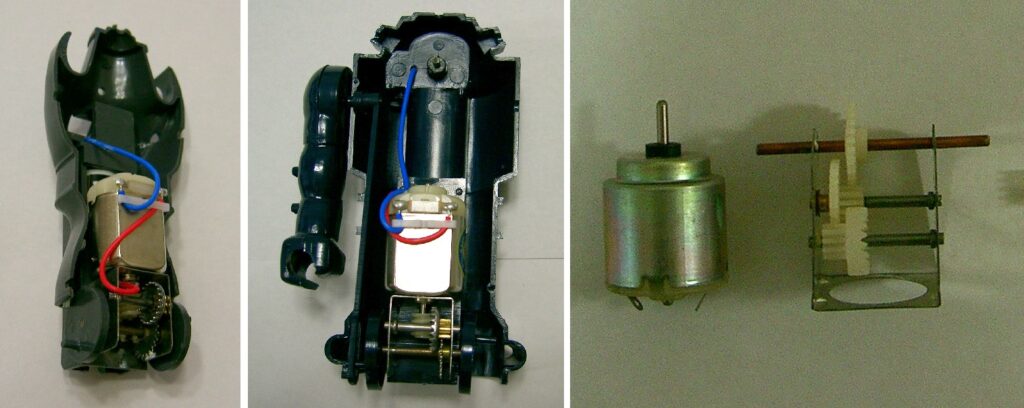
Photo-1: The soft vinyl is disassembled
Photo-2: After assembling the drive unit
※Initially, the sole of the foot was a transparent plastic plate, but due to difficulty in durability, it was improved to the current steel plate + steel rod in 2013. What looks like black tights are stretchy materials that have been partially replaced with soft vinyl.
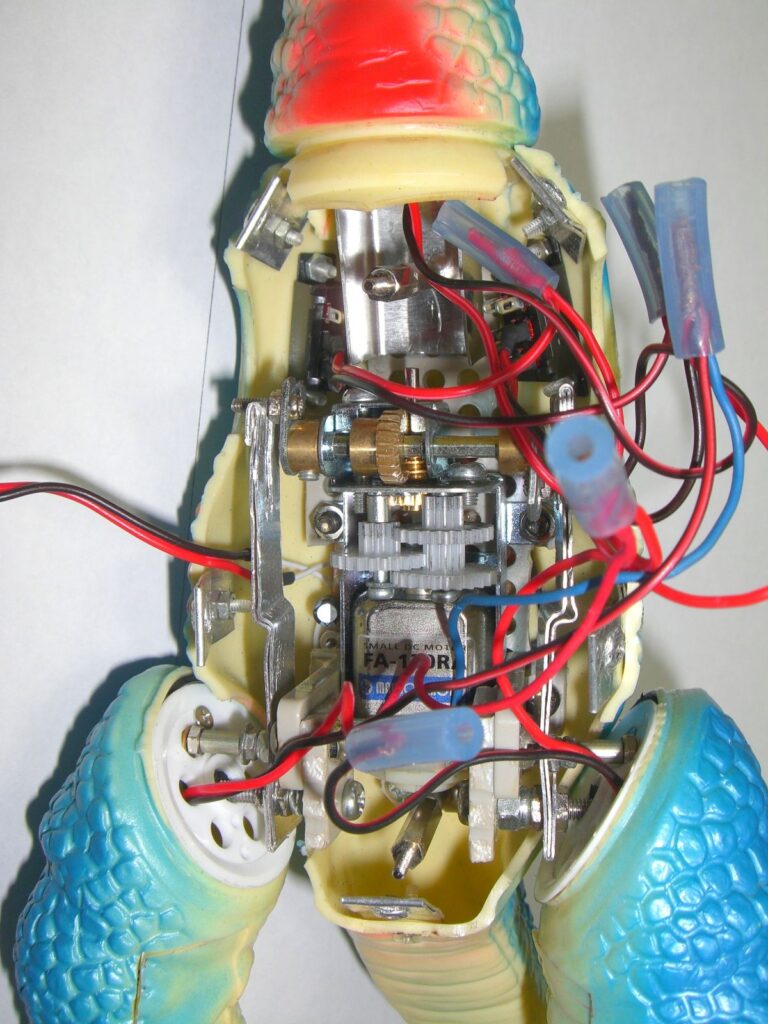
Photo-3: Right side after completion
Photo-4: Back side
Photo-5: Sole of the foot

(Professor’s one-point advice)
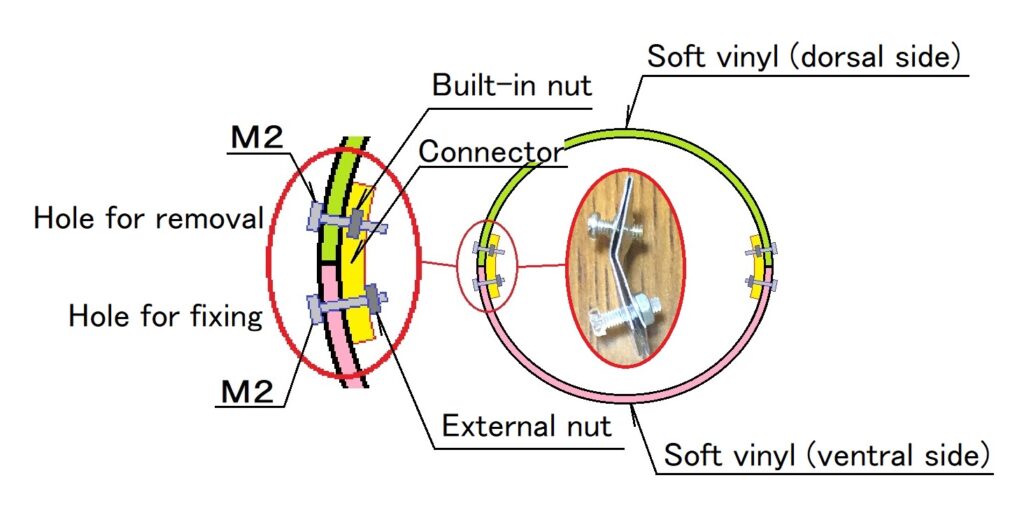
Adhesion is the easiest way to put back the soft vinyl that was disassembled for installation the drive unit, but then you need to remove the adhesive after each maintenance. Therefore, in this project, I am using screwing with a self-made connection device. As I announced before, it doesn’t require welding and all the materials are available at home improvement stores or mail orders, so I think it’s easy to make. This time, I will introduce how to make a connector using M2 bolts. It may seem awkward to make by looking at the group photo below, but as shown in the conceptual diagram, all you have to do is make a plate with a nut fixed to one of the two holes. Instead of welding, it is an image of sandwiching a nut in a folded metal plate and fixing it.
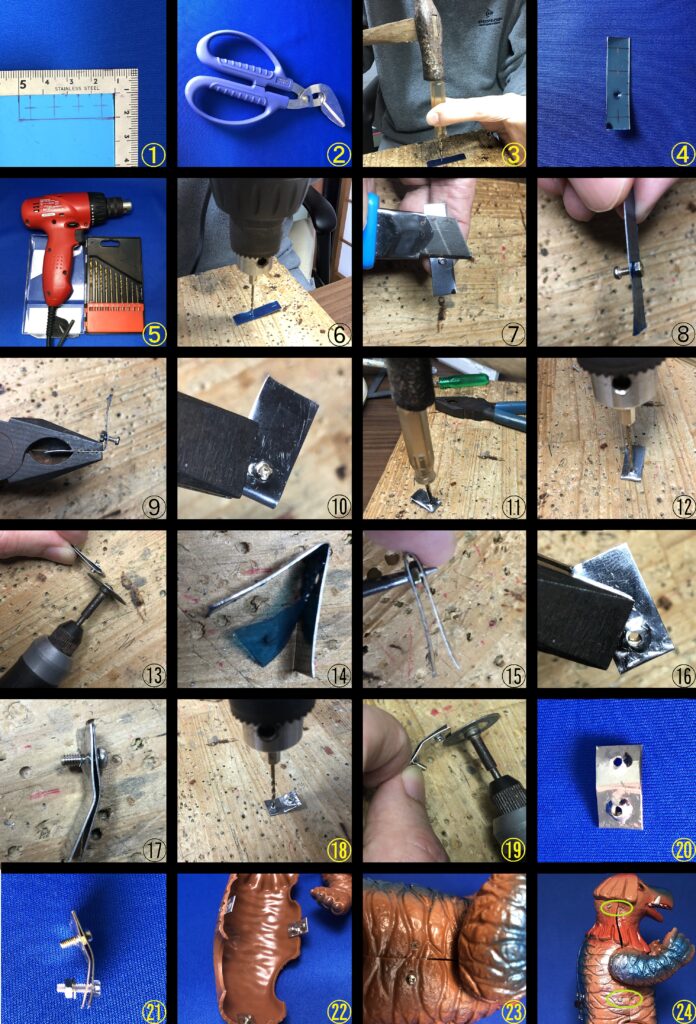
① Cut out a 10 mm x 40 mm strip-shaped plate from a stainless-steel plate (thickness 0.3 mm) sold at home centers, etc. (The photo shows the blue sticker on the back with the dimensions marked).
※ Aluminum plate is softer and easier to handle, but stainless-steel plate will be cleaner after completion. I think the point of sticking to the magnet is also advantageous.
② You can cut it with ordinary scissors, but it may hurt your hands, so use the one dedicated to steel.
③ Make a hole in the center 15 mm from the edge with an awl (the position of the second or third + mark from the edge in the photo of ①). You don’t need a very big hole.
④ The state where the hole has been drilled.
⑤ An electric drill is an essential item. Here, a bit with a diameter of 2 mm is used.
⑥ Re-drill the position of the hole made with the awl with an electric drill.
※ If you suddenly drill a hole with an electric drill, it will take time, and the bit will escape during the work and the hole will shift, so be sure to drill the hole in advance with an awl.
⑦ If you make a hole with an awl, burrs will be generated around the hole, so you are removing the burrs with a cutter (If you remove the burrs with a router as in ⑬, you will not be injured).
⑧ Pass the machine screw M2 through the hole and tighten the hexagon nut so that the screw does not pop out.
⑨ Bend the stainless-steel plate lightly from the center so that the nut is on the inside.
⑩ Press the area around the nut with pliers until the hexagon is lightly raised.
⑪ Open the stainless-steel plate from the center line, remove the screws and nuts, and fold it lightly from the center again. Pass an awl through the hole and make a hole that penetrates the two plates.
⑫ Drill a hole with an electric drill (2 mm diameter bit).
⑬ Remove burrs.
⑭ Open the stainless-steel plate slightly from the middle line and peel off the blue sticker on the inside.
⑮ Drop the nut into the hexagonal dent made in ⑩.
⑯ Firmly press the area around the nut with pliers to fix the nut so that it does not move.
⑰ If it is better to bend the connector to fit the shape of the soft vinyl, screw it through in advance and then bend it.
※ If you bend the connector without passing the screw, the hole may shift and the screw may not pass later.
⑱ On the opposite side of the hole for removal (15 mm from the end), use an awl and an electric drill to make a hole for fixing.
⑲ Remove burrs.
⑳ Completed connector. The top is a hole for fixing, and the bottom is for removal.
㉑ In the project, the screws used for removal (top of the photo) are frequently opened and closed, so durable steel screws are used. Also, for the screws used for fixing (bottom of the photo), transparent plastic screws are used to prevent make an accidental loosening the screws. However, please note that the plastic screw breaks quite easily.
㉒ A state in which a connector is installed on the ventral side of the soft vinyl that is divided into two parts. In this case, the dorsal side is the hole for removal.
※ Placing the holes for removal on the dorsal side makes it difficult to see the steel screws from the front. If you are concerned about the plastic screw on the ventral side, please paint it.
㉓ A state in which a screw was passed through the hole for removal and the back and belly were connected (the top is the belly and the bottom is the back). When making a hole from the outside of the soft vinyl at the hole for fixing position, if the hole position shifts, a gap may be created between the back and belly of the soft vinyl. In that case, make the hole for fixing of the connector long and adjust.
㉔ It is enough to connect at 5 places, 2 places on the left and right neck or shoulders, 2 places on the left and right flanks, and 1 place on the crotch (or the base of the tail), but if you care about the gap between the soft vinyl, please add connectors.
No.7 mutilation monster “Gronken"

This time, I will introduce the mutilation monster “Gronken" that appeared in episode 27. The script by Shinichi Ichikawa is wonderful, and it is a youth drama unique to this era. The director is Masanori Kakei, and Rumi Sakakibara, the heroine of this drama, is much more beautiful than other works.
The material this time is a soft vinyl doll made by the old “Bullmark." The characteristic of Gronken is the rotating round saw built in both hands. To reproduce this, I cut the soft vinyl saw and replaced it with a saw made of stainless-steel plate. Because it is difficult to perform both rotating saws and walking with a single motor, small motors are placed on the left and right arms in order to rotate saws.
Bullmark’s Gronken looks like a thug, so I thought I’d make him walk like that. Specifically, like “Marusan" plastic model monsters, it has a reverse rotation prevention roller on the sole, but the movement of both feet is not a slide but a step. Moreover, by intentionally rotating the gear in the reverse direction (backing if there is no roller), it moves forward while shaking the body greatly. Since this is a technique used in the “Gamera" series of “Nitto" plastic models, this walking is called the “Nitto + Marusan" formula in this project. As you can see from the video, I succeeded in making “Gronken" 's walking like a thug.


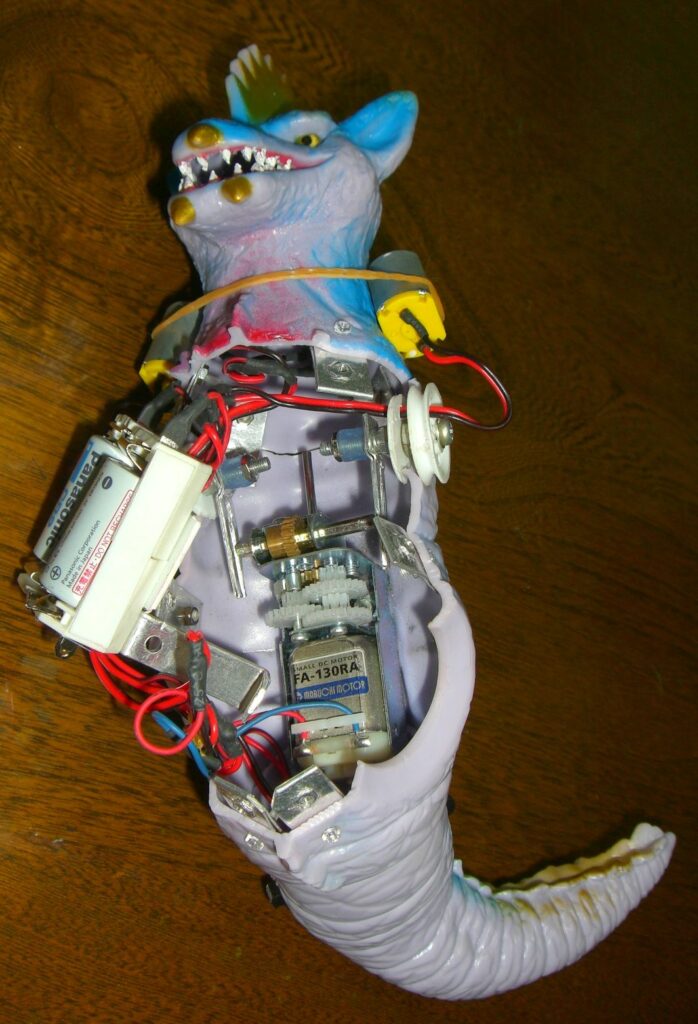
Photo-3 
Photo-4

Photo-5 
Photo-6
Photo-1: (Left) Soft vinyl doll, (Right) After dismantling
Photo-2: (Left) Soft vinyl saw, (Middle) Rotating mechanism, (Right) Rotating
Photo-3: Installation of the “Universal Gearbox" and two small motors
Photo-4: Installation of a voice recorder and a battery box
Photo-5: Side after completion
Photo-6: Back side after completion
(Professor’s one-point advice)
I have explained the walking system adopted in this project several times so far, but I would like to organize it once here. The walking systems I think of can be broadly divided into the following 11 types. For each type, the names of the electrified soft vinyl monsters are also listed this time.
①Marusan type: It is often used in the plastic models of “Marusan" and “Bullmark." The “Ultra Q" and “Ultraman" electric monster series are famous. Basically, it is a walking with a sliding foot, and there is a rubber roller on the sole of the foot that rotates in only one direction.
※Granadas, Arstron, Gronken, Kingsaurs III
②Aoshima type: Same as “T.P.S." 's robot introduced this time, it is used in many plastic models and toys such as “Aoshima" 's “Spectreman" series. Basically, it is a stepping walk, and an auxiliary rod to prevent falls is attached to the sole of the foot.
※Bemstar, Twintail(with out auxiliary rods)
③Midori Shokai type: Run with tires hidden inside the body, sometimes move legs with a dummy. It is used in plastic models such as “Midori Shokai" 's robots and moving manga series.
※Zazarn, Gokinezura, Alien Nackle, Z-ton Ⅱ, Sasahiler, Prizuma, Varricane
④Imai type: Pseudo-feet walk in and out from the sole of the foot. “Imai" 's plastic model “Giganto" and “Bandai" 's plastic model “Mazinger Z" are famous.
※Muruchi, Ultraman
⑤Nitto type: It is often used in the “Nitto" 's plastic model “Gamera" series. Basically, it is a stepping walk, but the rotation of the crank is opposite to ② and it is in the back direction, so the body shakes greatly from side to side. A forward force is generated by changing the resistance in the direction orthogonal to the direction of travel, such as making the inside of the sole a roller and the outside a protrusion.
※(Gronken)
⑥Crown type: Basically, the same as ①, but instead of rubber rollers, steel claws restrain the movement of the sliding foot in the backward direction. “Crown" 's plastic model “Giant Robo" series, “Marui" 's plastic model “Super Robot", etc.
※(None)
⑦Imai (insect series) type: A quadrupedal walking type, famous for “Imai" and “Bandai" 's insect series, and “Nitto" 's plastic model “Jiger."
※Leogon
⑧Nihon hobby (super spring series) type: A bouncing type such as “Nihon hobby" 's plastic model “Kijira" and the Chinese plastic model “Pigmon" (made by “Marusho").
※Takkong
⑨CUBE type: Moves forward while moving the center of gravity, such as tilting the body. CUBE’s robot is famous. Autonomous robots with sensors and programming are also of this type, but they will not be dealt with in this project.
※Billgamo
⑩Doyusha (monster racer) type: A type that moves on a car or ship such as “Doyusha" 's plastic model “monster racer Pepira" and the “Crown" 's plastic model “Bakabon" series.
※Terochilus, Yadokarin
⑪Masudaya (moving monster series) type: Same as the vibe function of mobile phones, it moves by vibration. The so-called trembling monster of “Masdaya" is famous.
※Stegon
This time, let’s explain ①Marusan type.
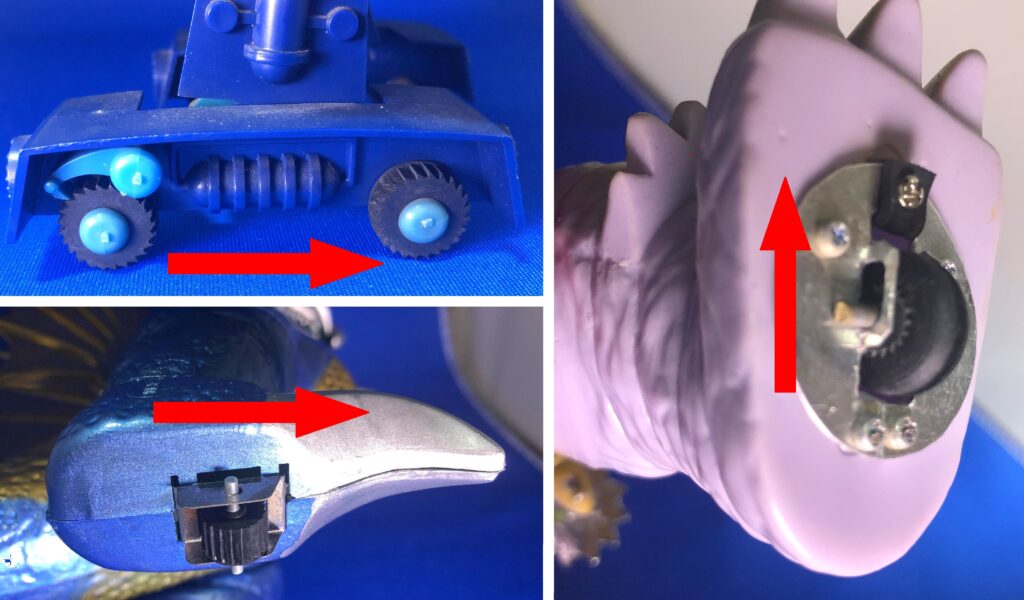
The upper left of the photo is the foot of the “Explo Robot" introduced last time, and the arrow indicates the direction of travel. The stopper on the rubber roller does not constrain the clockwise rotation of the roller, but it does restrain the counterclockwise rotation. As a result, when the foot is moving left and right with a sliding foot, the foot moves smoothly in the direction of the arrow, but in the opposite direction, the foot does not move due to the friction between the roller and the ground, and the body moves in the direction of the arrow due to the reaction. By repeating this, it goes in the direction of the arrow. The lower left is the sole of the “Bullmark" 's plastic model “Gigan," which is a type without a stopper. The shaft of the roller is supported by a slotted hole, and when the foot moves in the direction opposite to the arrow, the roller moves in the direction of the arrow so that it does not rotate in contact with the edge. This is the type often found in Bullmark" 's monsters. The photo on the right is the sole of the “Gronken" introduced this time. This is my original, which basically follows the “Bullmark" type, but places rubber in front of the roller to eliminate the need for grooving the roller.
No.8 huge fish monster “Muruchi"

This time, I will introduce the huge fish monster “Muruchi" that appeared in the 33rd episode “Monster master and boy," which is highly regarded as a masterpiece. I think this story is all about the excellent performance of the child actor who played Ryō Sakuma. Ryō, who is rumored to be an alien in the city and is persecuted, goes to buy bread in the downpour and is driven back by the shopkeeper’s woman saying, “Go away." No matter how many times I see this scene, I almost feel like tears. After that, the daughter of the bakery who chased Ryō said, “I’m not sympathetic. I’ll just sell it. Because I’m a bakery.." And she gave him bread. This scene was really refreshing and touching as a children’s program.
In this electrification project, “Marmit" 's soft vinyl doll “2nd generation Muruchi" was used. The 2nd generation is a monster that appears in “Ultraman Ace," so it may not be suitable, but I used it because it was very good as a soft vinyl doll.
Speaking of Muruchi, that sad cry is characteristic. It’s not fun just to cry, so I decided to have it repeat the action of walking for a period of time, then stopping, crying, and then walking again. In order to mechanically control a series of movements, I made my own device shown in Photo-3.
In addition, this time’s walking system is a so-called “Imai type" (see the previous article) in which pseudo-feet go in and out from the soles of the feet.

Photo-1 
Photo-2
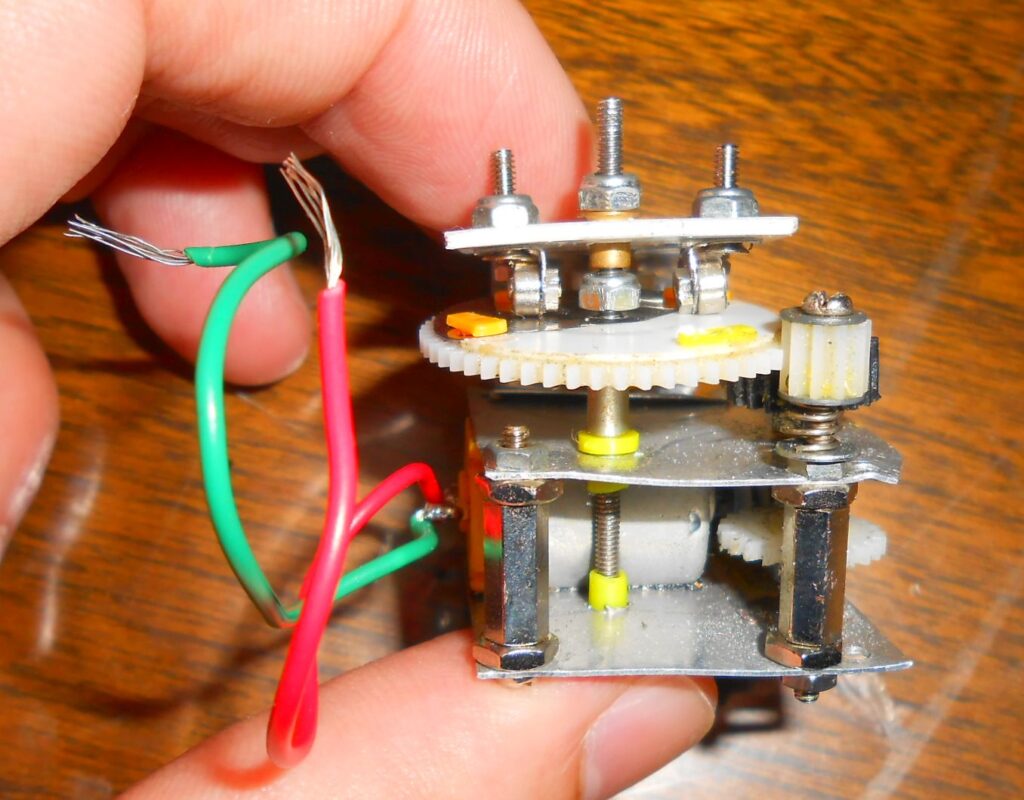
Photo-3 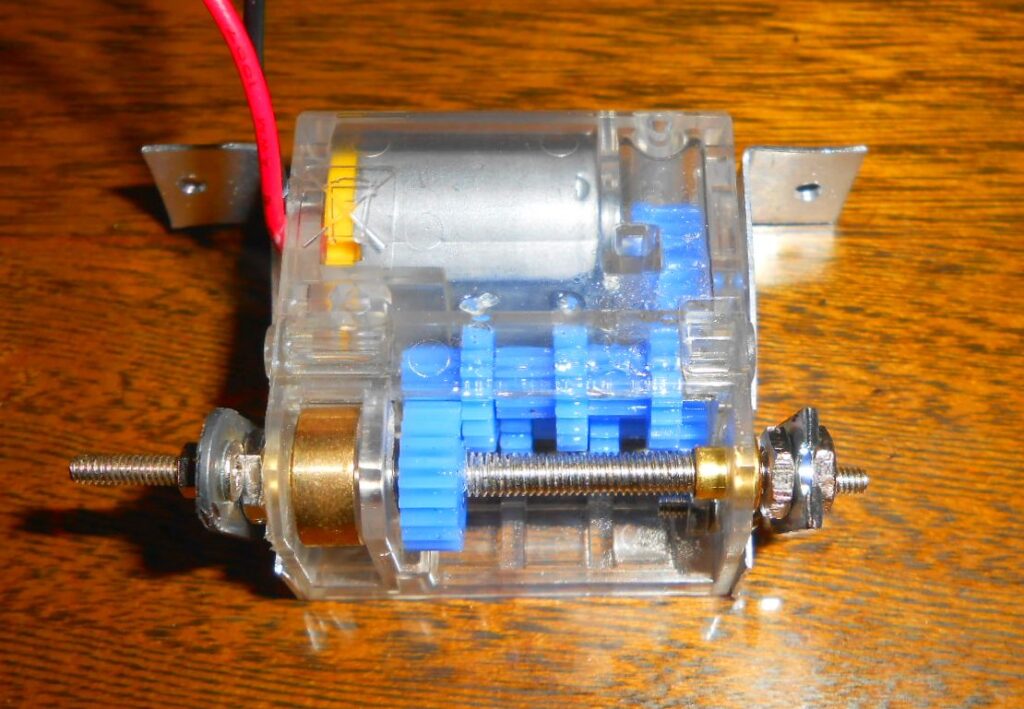
Photo-4

Photo-5 
Photo-6
Photo-1: Soft vinyl doll before the start
Photo-2: The control device (top) and gearbox (bottom) are installed.
Photo-3: Control device
The long all-screw rod in the center is always in contact with the metal plate of the rotating gear. The screws on the left and right are connected to the metal roller, which turns on while the roller is in contact with the metal plate of the gear and turns off otherwise.
Photo-4: Gearbox (Tamiya's “Mini Motor Multi-stage Gearbox“)
The standard output shaft is hexagonal square steel, but it has been replaced with all-screw rods for use as a crank gear.
Photo-5: Front after completion
Photo-6: Back after completion
This time, the screws are conspicuous because the body of “Muruchi" is not painted.
No.9 hermit crab monster “Yadokarin"

Do you know a plastic model “Hermit Crab" made by Bandai? It was an excellent thing which runs around while expanding and contracting eyeballs and which is able to exchange shells. This “Yadokarin" is a hermit crab monster, so I thought I’d make it as interesting as this plastic model.
As a result, as shown in the photo, it became a surrealistic thing which Yadokarin on a strange dolly runs around. The features of this time are as follows.
・It automatically repeats forward and backward movement.
・Whether moving forward or backward, it automatically backs up when it hits an obstacle.
・ It runs in an S shape while changing direction.
・The above operation is performed by one motor (the drive unit is used by partially modifying Tamiya's Universal Gearbox).
・ Four-wheel drive using Tamiya’s drive belt.
・You can make it cry.
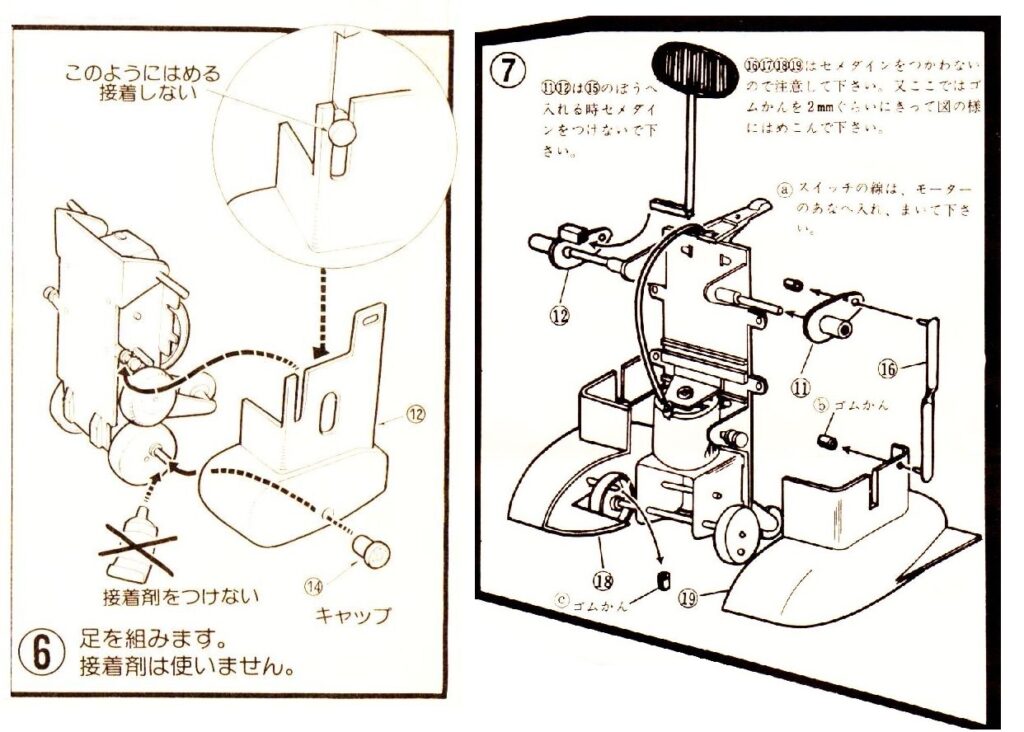
Since the rod protruding horizontally from the dolly controls the forward and backward movement by mechanically switching the switch, the mounting position of each part was carefully adjusted. Also, since it is necessary to slide the 3mm output shaft of the Universal Gearbox forward to arrange the vertical rod used for turning, a worm gear was put on the orthogonal 2mm output shaft and an additional drive case was installed.
In addition, although I used a soft vinyl doll made by the manufacturer called “M1–gō" as the material, I bent its hind legs backward and installed so that it sits on a dolly.
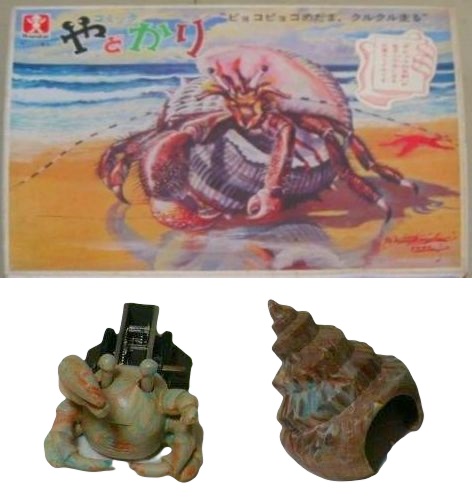
“Hermit crab"
(image picked up from the internet)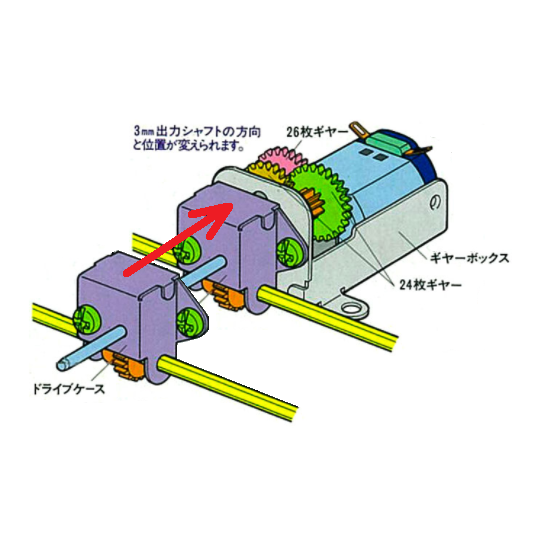
Image of 3mm output shaft slide
(modified the one posted on Tamiya HP)

Photo-1 
Photo-2 
Photo-3
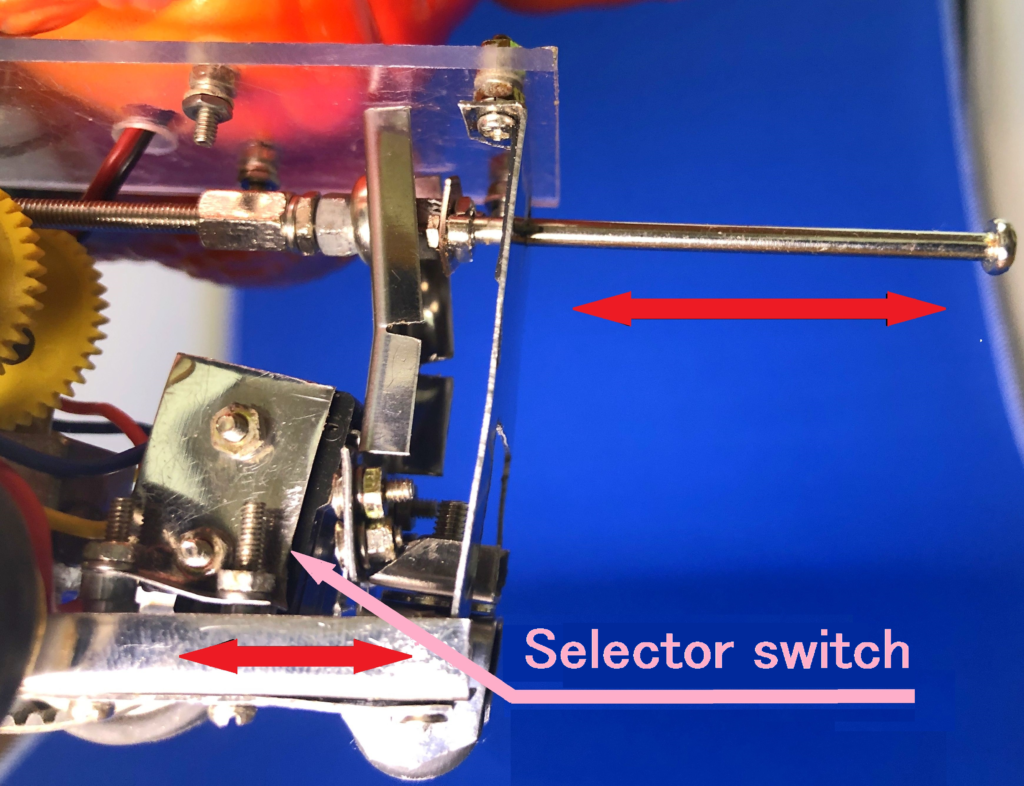
Photo-4 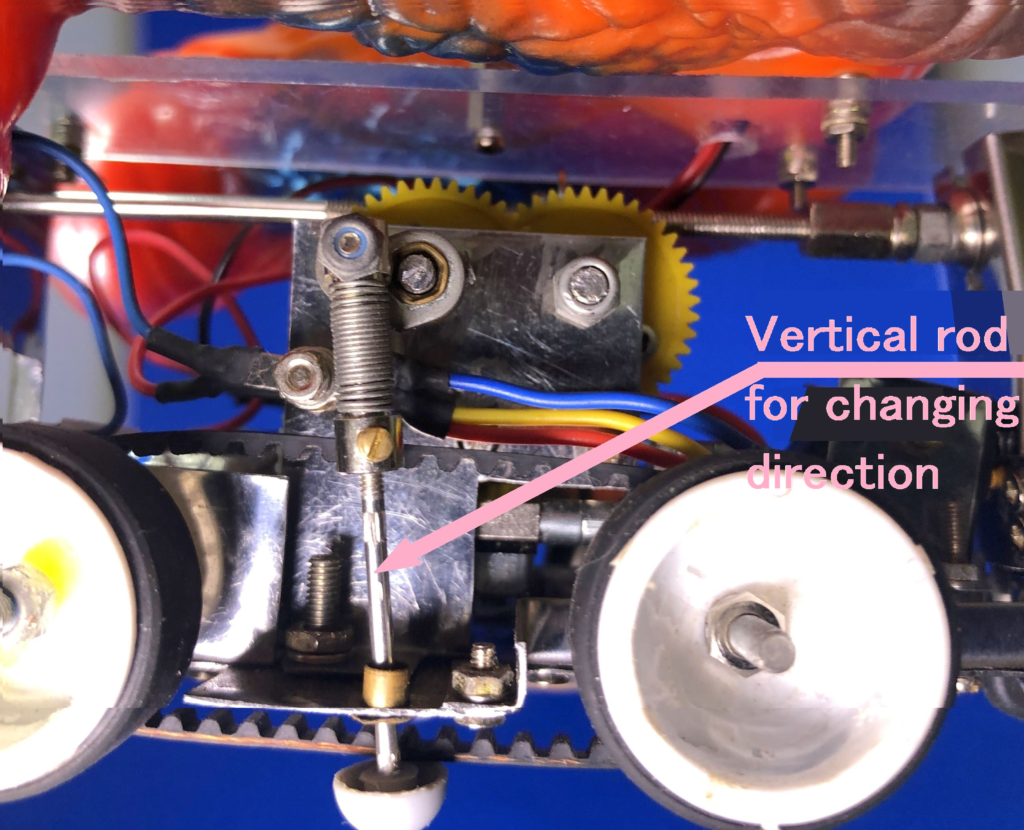
Photo-5
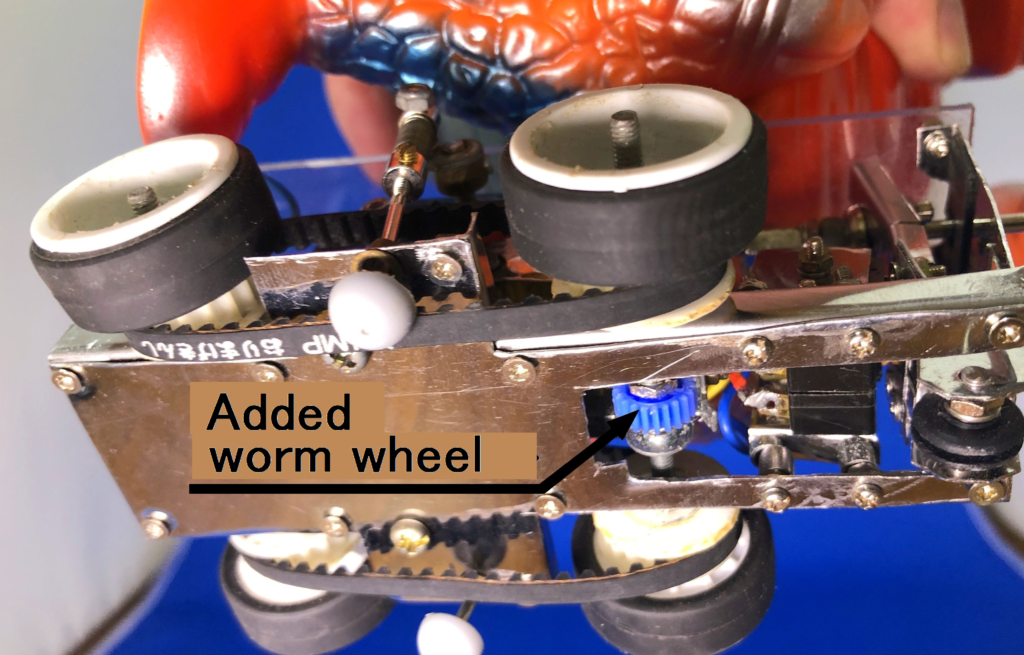
Photo-6 
Photo-7
Photo-1: Front side after completion
Photo-2: Back side after completion
Photo-3: Right side after completion
Photo-4: The horizontal movement of the rod switches the selector switch ON-OFF. The rod is held in a horizontal position by a magnet (to avoid the switch being neither ON nor OFF due to vibration during movement).
Photo-5: The vertical rod moves up and down due to the crank gear added to the top of the Universal Gearbox.
Photo-6: The underside of the dolly. You can see the worm wheel inside the added drive case to slide the 3mm output shaft forward.
Photo-7: Automatic forward / backward switching mechanism. The protrusion ① attached to the rotating gear pushes the disk ② of the horizontal rod, and the rod slides in the horizontal direction.
No.10 Destroy All Monsters

This time, I will introduce the three monsters, ”Takkong,” “Zazarn," and “Arstron," appeared in the first episode “Destroy All Monsters." This first episode was directed by Inoshirō Honda, who had worked on many Toho monster movies. Jirō returns home screaming, “Monsters have appeared," and immediately leaves the house. Hideki Gō chases Jirō to bring him back. A child rushing to the pigeon hut on the roof of the housing complex to let his pigeons escape…These scenes are full of urgency, depicting the appearance of monsters from a human perspective, which is rare in the Ultra series. In addition, the scene, that villagers are running away while the bell on the fire lookout tower is ringing, is able to be said the synonymous with director Honda. And his profound directing, which is comparable to Toho monster movies, shook the viewers’ hearts and succeeded in getting the new program called “Return of Ultraman" on track.
Well then, let’s take a look at the monsters in order.

①Oil monster ”Takkong"
I used the soft vinyl doll made by X PLUS. Since it is very realistic, I adopted a method of moving by repeated jumps in order not to spoil the appearance. I built a jump mechanism using mainsprings with reference to plastic models such as “Kijira" which was made by Japan Hobby as the “Super Spring Series," and “Pigmon" which was made by Marusho as the “Walking-around Ultraman Monster Series" and which was resold by Chugoku Fukuman Toy Co., Ltd. (FUMAN).
It’s a different walking style from the real Takkong, but I think I was able to make the heavy doll jump well.

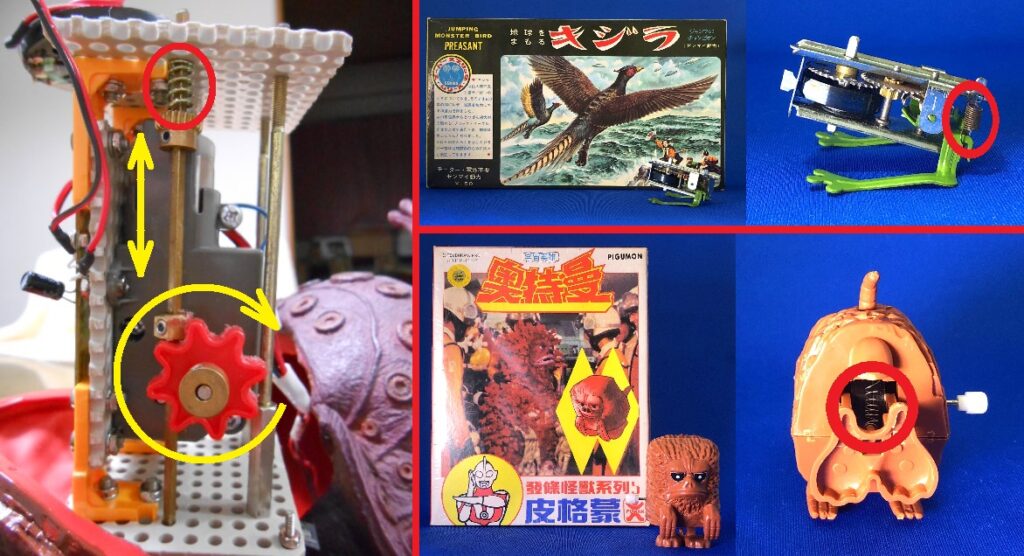
Left: “Takkong" 's jump mechanism. The rotating sprocket lifts the protrusion on the vertical rod and compresses the upper spring (enclosed in red). When the protrusion comes off the sprocket, the rod is pushed downward by the spring reaction force.
Upper right: Outer box and mainsprings of “Kijira." It has been devised to move the legs bounce with special gears.
Lower right: Outer box and sole of “Pigmon." It’s still available at a low price, but I think it’s a bargain because its movement is surprisingly interesting.

②Sludge monster “Zazarn"
I used the soft vinyl doll from the CCP's “Masaaki Satake Collection." It is a low price and very well-made doll, but since the body is slim, it is not possible to incorporate a large-scale drive device, so I took the plunge and decided to use Tamiya's “Underwater Gearbox Set" in order to make ”Zazarn” amphibious. Basically, it only moves straight forward, but you can also play in the bath because it uses an underwater motor. I attached it webbing blades to the rotating wheels in order to make it swim on the surface of the water, but the thrust was weak and it could not proceed. It is thought that a floating material such as the styrofoam is required to make it float on the surface of the water.



Left: The simple walking device with an underwater gearbox, pulleys, and a drive belt.
Middle: Left side. There is an ON-OFF switch on the top of the head.
Right: Back side.

③Ferocious monster “Arstron"
The old Bullmark's soft vinyl doll is used. It has a good surface finish, but its face is too cute, so I put on the realistic eyes that I scanned the photo. The walking system is a so-called Marusan type, but the rotation axes of both feet fitted to the torso are not in a straight line, and it is not possible to walk with a single axis gear. For this reason, it is usually necessary to change the mounting angle of the foot to the torso, and “Arstron" has become also bow-legs. In addition, in “Granadas" of the same project, I succeeded in walking without changing the attachment angle of the foot from the soft vinyl doll. I would like to introduce the mechanism on another occasion.
I struggled to shoot a flame-like mist from “Arstron" 's mouth with a mist spray. However, I couldn’t solve the problem of water leakage in the water tank and gave up. I had no choice but to use ZIPPO’s flint to fire sparks from his mouth.

Left: Original soft vinyl doll. The texture of the skin is wonderful.
Right: Tamiya’s “Universal Gearbox" is installed.
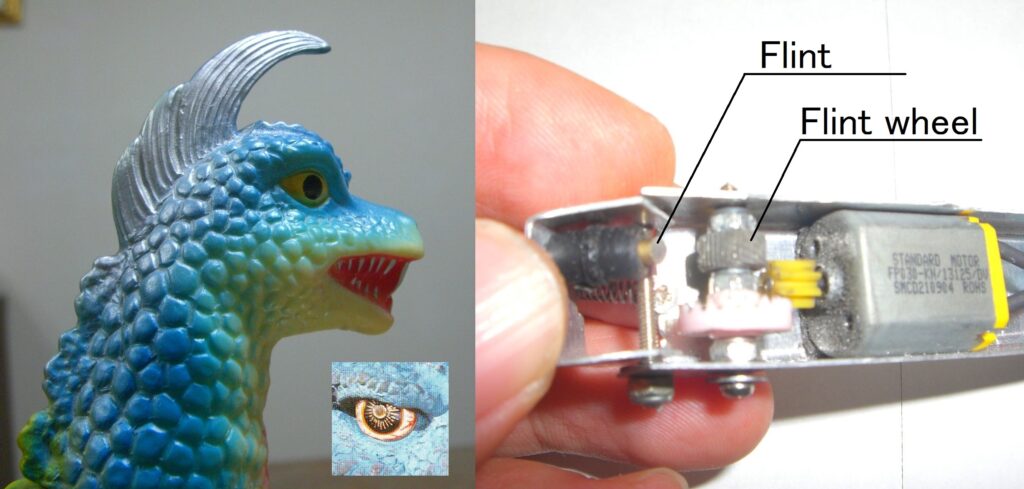
Left: Original face of the doll and actual eyes (lower right).
Right: Ignition device. The flint wheel was taken out from a 100-yen cigarette igniter. And I bought ZIPPO’s flint at a tobacco shop.

Left: Front after completion. The directions of the left and right leg rotation axes were matched by inserting a member between the foot and the torso to adjust the foot mounting angle. And since both feet are battery boxes, the protrusion on the lid can be seen at the bottom.
Right: Back side after completion.
(Professor’s one-point advice)
I will explain the walking systems of the Midori Shokai’s robot plastic models.
The 100-yen robot series basically consists of a worm gear and a gearbox with two gears. I don’t have “Missile Robot," so it’s unconfirmed, but it’s highly possible that all three have the same gearbox. And all run on plastic tires.
On the other hand, “(Young) Tiger Robo" consists of a worm gear and a gearbox with three gears. The yodel’s gearbox is probably same as Midori’s one. A cylindrical motor (RE-14) was used in “(Young) Tiger Robo," but it has been changed to a square motor (FA-13) in “Delmac," and the gearbox is also newly manufactured or diverted from another plastic model. Plastic tires are used regardless of manufacturers. From the instructions, we can read the skillful gimmick that moves both hands and feet and the antenna. In the electrification project of this blog, I often refer to these moving parts of Midori.
A rare mechanism is used for “Gutsman" and “Geigerman," that rotates the plastic tires by rubber tires connected to the mainsprings. However, it seems that rubber belts for plastic tires were added later, probably because there were many cases where the plastic tires slipped and did not rotate.