帰ってきたウルトラマン放送50周年 勝手に記念
ソフビ電動化計画 総集編 Vol.2
目次/Table of contents
No.6 宇宙大怪獣ベムスター

今回は、第18話「ウルトラセブン参上!」に登場した宇宙大怪獣ベムスターを紹介します。
可愛いルックスと鳴き声に反して、やたらめったらに強い宇宙怪獣で、ウルトラマンに一度は勝利します。第二期ウルトラシリーズの人気怪獣です。
電動化には、「怪獣郷」ブランドのソフビを使用しました。非常に出来のよいソフビです。今回は、足裏に転倒防止の補助棒がついたオーソドックスな歩行スタイルを採用しています(本プロジェクトではこれを「アオシマ式」と称します)。腕を振り、口を開閉しながら歩きます。もちろん、鳴き声の再生も可能です。


写真ー2 
写真ー3

写真ー4 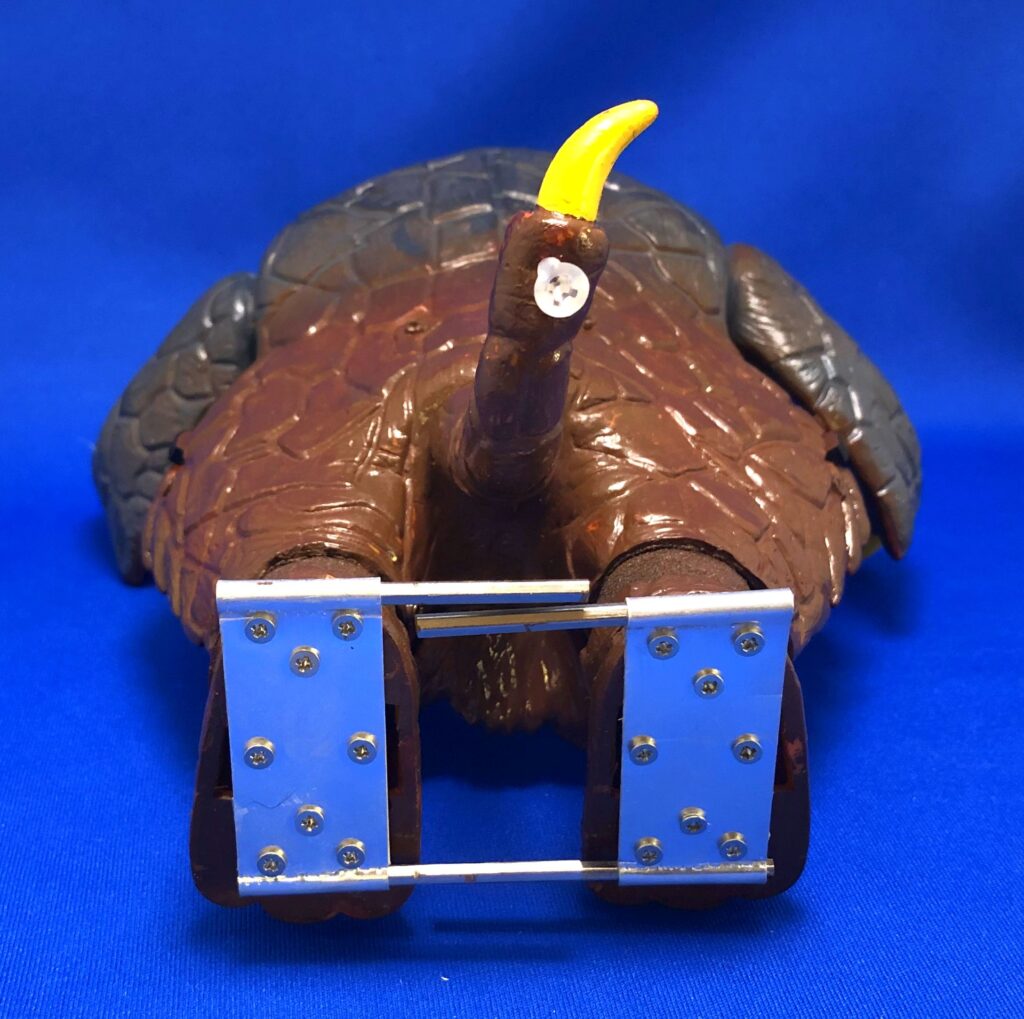
写真ー5
写真ー1:ソフビをばらしたところ
写真ー2:駆動装置を組み終えたところ
※当初は足裏を透明プラ板としていましたが、耐久性に難があるため2013年に現在の鋼板+鋼棒に改良しました。黒いパッチのように見えるのは伸縮性のある材料で、一部、ソフビと置き換えています。
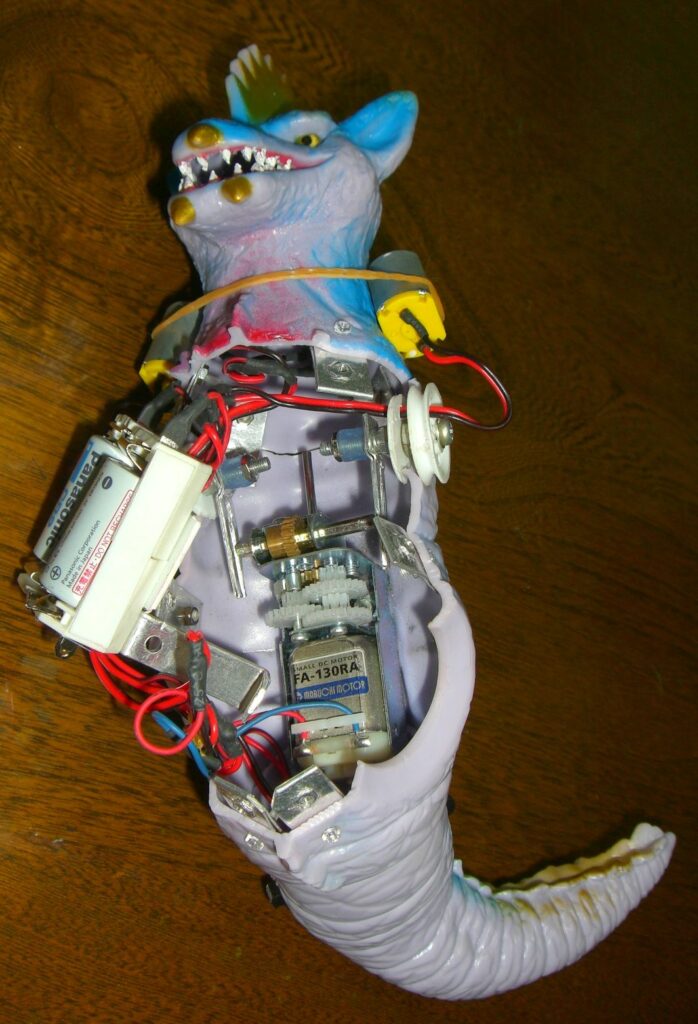
写真ー3:完成後の右側面
写真ー4:背面
写真ー5:足裏

(教授のワンポイントアドバイス)
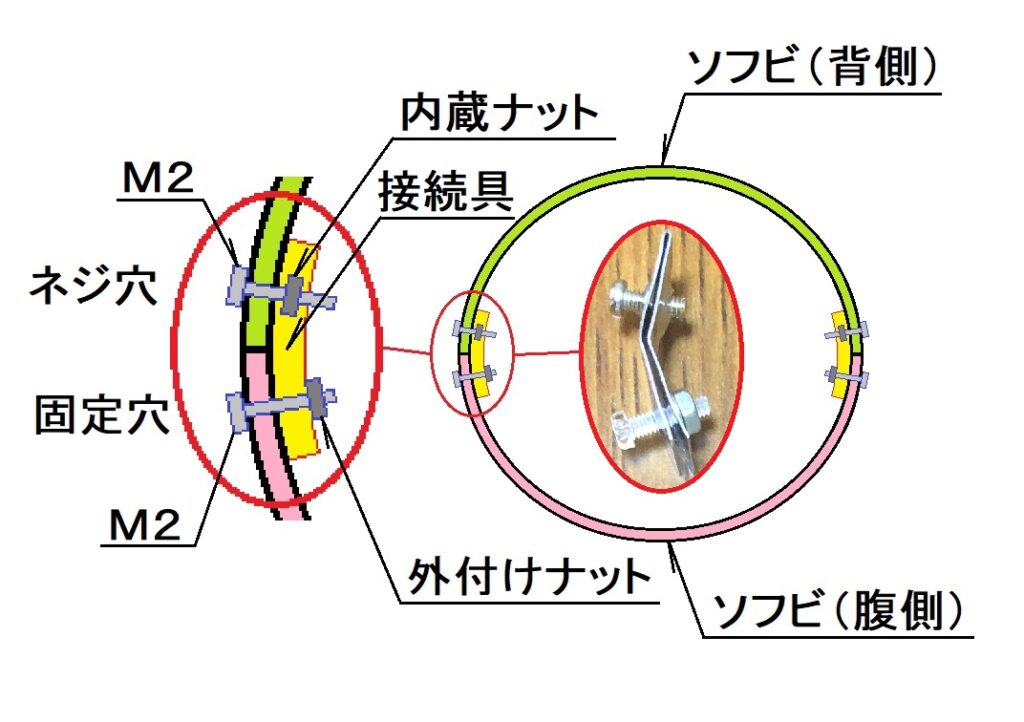
駆動部などの組込みのため一旦ばらしたソフビを元に戻すには接着が一番簡単ですが、それではメンテナンスのたびに接着剤を剥がす必要があります。そこで本プロジェクトでは、自作した接続具によるネジ止めを使用しています。以前アナウンスしたとおり、溶接を必要とせず、材料はホームセンターや通販で手に入るものばかりなので簡単に製作できると思います。今回は、M2ボルトを使用した接続具の作り方を紹介します。
下の組写真を見ると製作は面倒に思えるかもしれませんが、概念図に示す通り、要は2穴の片方にナットが固定されているプレートを作るだけです。溶接の代わりに折りたたんだ金属板にナットを挟み込んで固定するイメージです。
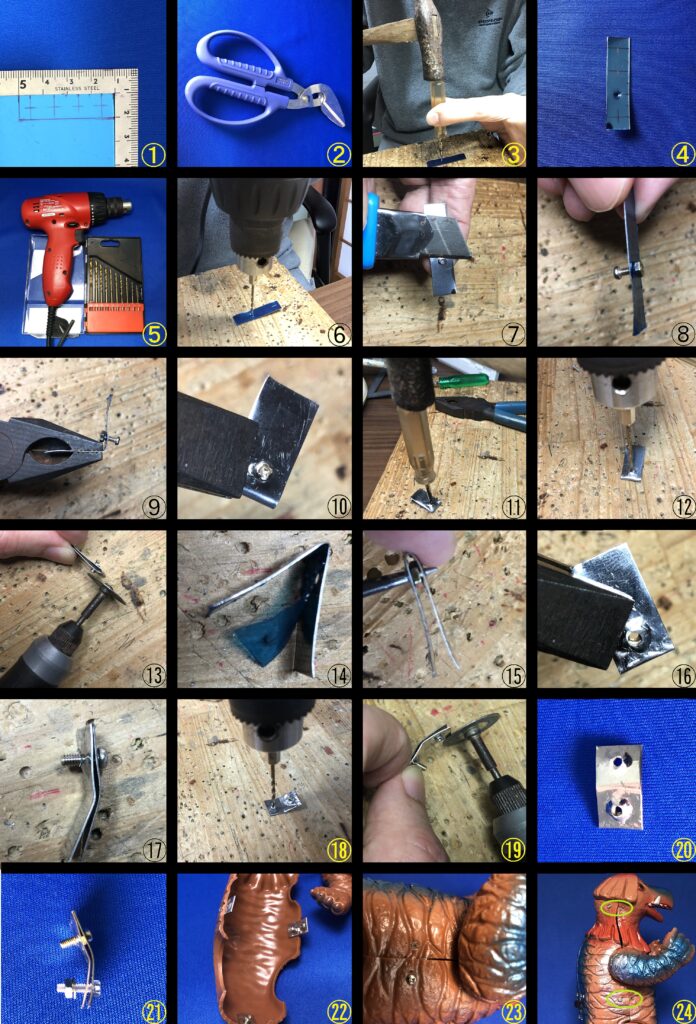
① ホームセンターなどで売っているステンレス板(厚み0.3mm)から、10mm×40mmの帯状の板を切り出します(写真は裏側の青いシールに寸法をマーキングした状態)。
※アルミ板の方が柔らかく取り扱いは容易ですが、完成後はステンレス板の方が綺麗になります。磁石にひっつく点も有利かと思います。
② 普通のハサミでも切れますが、手を痛めることもあるので金切りバサミを使用しましょう。
③ 端から15mmの位置のセンターに錐(キリ)で穴を開けます(①の写真の端から2つ目または3つ目の+印の位置)。あまり大きな穴は必要ありません。
④ 穴が開いた状態。
⑤ 電動ドリルは必須アイテムです。ここでは2mm径のビットを使用します。
⑥ 錐で開けた穴の位置を電動ドリルで再度削孔します。
※いきなりドリルで削孔すると時間がかかる上に、作業中にビットが逃げて穴がずれたりするので、面倒がらずに事前に錐で穴を開けるようにしましょう。
⑦ 錐で穴を開けると穴周りにバリが発生するので、カッターでバリを取っているところ(⑬のようにルーターでバリを削ると怪我をしません)。
⑧ 小ねじM2を穴に通し、ねじが飛び出さない程度に六角ナットを締めます。
⑨ ナットが内側になるよう、ステンレス板を真ん中から軽く折り曲げます。
⑩ 六角形が軽く浮き出る程度に、ペンチでナット周りを押さえていきます。
⑪ ステンレス板を真ん中の折れ線から開いてネジとナットを取り除き、再度真ん中から軽く折り曲げます。穴に錐を通し、折り曲げた2枚を貫通する穴を開けます。
⑫ 電動ドリル(2mm径ビット)で削孔します。
⑬ バリを取り除きます。
⑭ ステンレス板を真ん中の折れ線から少し開いて、内側の青いシールをはがします。
⑮ ⑩でできた六角形の窪みにナットを落とし込みます。
⑯ ペンチでナット周りをしっかりと押さえていき、ナットが動かないよう固定します。
⑰ ソフビの形に合わせ接続具を曲げた方が良い場合には、事前にネジを通してから曲げます。
※ネジを通さずに接続具を曲げると、穴がずれて後からネジが通らなくなることがあります。
⑱ ネジ穴の反対側(端から15mm)に、錐と電動ドリルで固定用の穴を開けます。
⑲ バリを取り除きます。
⑳ 完成した接続具。上が固定用の穴で、下がネジ穴。
㉑ プロジェクトでは、ネジ穴に使用するネジ(写真上)には開け閉めする頻度が高いので耐久性の高い鋼製ネジを使用し、固定用に使用するネジ(写真下)には間違ってネジを緩めることがないよう透明のプラネジを使うことが多いですが、プラネジは結構、簡単に折れるので注意して下さい。
㉒ モナカ割りソフビの腹側に接続具を設置した状態。この場合、背中側がネジ穴になります。
※ ネジ穴を背中側にすることで鋼製ネジが正面から見えにくくなります。腹側のプラネジが気になる場合、塗装して下さい。
㉓ ネジ穴にネジを通し、背と腹を接続した状態(上が腹で、下が背中)。ネジ穴位置にソフビの外側から穴を開ける際、穴の位置がずれるとソフビの背と腹に隙間ができたりしますが、その場合、固定用の穴を長孔にして調整して下さい。
㉔ 左右の首または肩2ヶ所、左右の脇2ヶ所、股(尻尾の付け根)1ヶ所の5ヶ所程度で接続すれば十分ですが、ソフビの隙間が気になる人は接続具を追加して下さい。
No.7 八つ切り怪獣グロンケン

今回は、第27話に登場した八つ切り怪獣グロンケンです。市川森一さんの脚本は素晴らしく、この時代ならではの青春ドラマに仕上がっています。筧正典監督も、準主役の榊原るみさんを本当に美しく撮っていました。
さて、素材は旧ブルマァクのソフビです。グロンケンと言えば、両手の電ノコが特徴的です。これを再現するため、ソフビの電ノコを切断し、同スケールのものをステンレス板で製作しました。さすがに歩行と電ノコ回転の両方をモーターひとつで行うのは難しく、電ノコ用にミニモーターを左右の腕に配置しています。
ブルマァクのグロンケンはひどく悪人面なので、それに似合ったふてぶてしい歩行をさせています。具体的には、マルサン怪獣と同じで足裏に逆転防止ローラーを付けていますが、マルサンのようにすり足でなく、足踏みをさせています。しかも、ギヤをあえて逆回転(ローラーがなければバックする)させることで、身体を大きく揺らし前進します。日東プラモデルのガメラシリーズで採用されているテクニックなので、本プロジェクトではこの歩行を「日東+マルサン」式と称します。動画を見ていただければ分かりますが、グロンケンにチンピラのような歩き方をさせることに成功しています。


写真ー3 
写真ー4

写真ー5 
写真ー6
写真ー1:(左)着手前のソフビ (右)ソフビをばらしたところ
写真ー2:(左)ソフビの電ノコ (中)回転機構 (右)回転しているところ
写真ー3:ユニバーサルギヤと電ノコ用ミニモーター
写真ー4:ボイスレコーダーと電池ボックスの設置状況
写真ー5:完成後の側面
写真ー6:完成後の背面
(教授のワンポイントアドバイス)
これまで何回か、本プロジェクトで採用した歩行システムの説明を行ってきましたが、ここで一回整理しておきたいと思います。私が考える歩行システムは、大きく分けて次の11のタイプに分類されます。各タイプごとに、今回、電動化したソフビ怪獣の名前も記しています。
①マルサン式:マルサンとブルマァクのプラモデルに多く採用されている。ウルトラQやウルトラマンの電動怪獣シリーズが有名。基本はすり足歩行で、足裏に一方向しか回転しないゴムローラーがある。
※グラナダス、アーストロン、グロンケン、キングザウルス三世
②アオシマ式:今回紹介したトープレのロボットと同じで、アオシマの「スペクトルマン」シリーズなど、多くのプラモデル・玩具に採用されている。基本は足踏み歩行で、足裏に転倒防止の補助棒がついている。
※ベムスター、ツインテール(補助棒なし)
③緑商会式:体内に隠されているタイヤで走行する。ダミーで足を動かすこともある。緑商会のロボットや動くマンガシリーズなどのプラモデルに採用されている。
※ザザーン、ゴキネズラ、ナックル星人、ゼットン二代目、ササヒラー、プリズ魔、バリケーン
④イマイ式:疑似足が足裏から出入りして歩行する。イマイの「鉄人28号」、バンダイの「マジンガーZ」が有名。
※ムルチ、ウルトラマン
⑤日東式:「ガメラ」シリーズに多く採用されている。基本は足踏み歩行だが、クランクの回転は②と逆でバック方向のため、体が左右に大きく揺れる。足裏の内側をコロ、外側を突起にするなど、進行直交方向の抵抗を変えることで前進力を生む。
※(グロンケン)
⑥クラウン式:基本は①と同じだが、ゴムローラーの代わりに鋼製の爪により、すり足の後退方向の移動を拘束する。クラウンの「ジャイアントロボ」シリーズ、マルイの「スーパーロボ」など。
※該当なし
⑦イマイ(昆虫シリーズ)式:四足歩行タイプで、イマイやバンダイの昆虫シリーズ、日東の「ジャイガー」などが有名。
※レオゴン
⑧日本ホビー(スーパースプリングシリーズ)式:ぴょんぴょん跳ねるタイプで、日本ホビーの「キジラ」や、中国のプラモデル「ピグモン」(マルショウ製)などが該当する。
※タッコング
⑨CUBE式:体を傾けるなど重心移動を行いながら前進する。CUBE社のロボットが有名。センサーやプログラミングによる自律型ロボットもこのタイプだが、本プロジェクトでは取り扱わない。
※ビルガモ
⑩童友社(怪獣レーサー)式:車や船に乗って移動するタイプで、童友社の怪獣レーサー「ぺピラ」、クラウンのプラモデル「バカボン」シリーズが該当する。
※テロチルス、ヤドカリン
⑪マスダヤ(動く怪獣シリーズ)式:携帯電話のバイブ機能と同じで、振動で動く。マスダヤのいわゆるブルブル怪獣が有名。
※ステゴン
今回は①のマルサン式について説明しましょう。
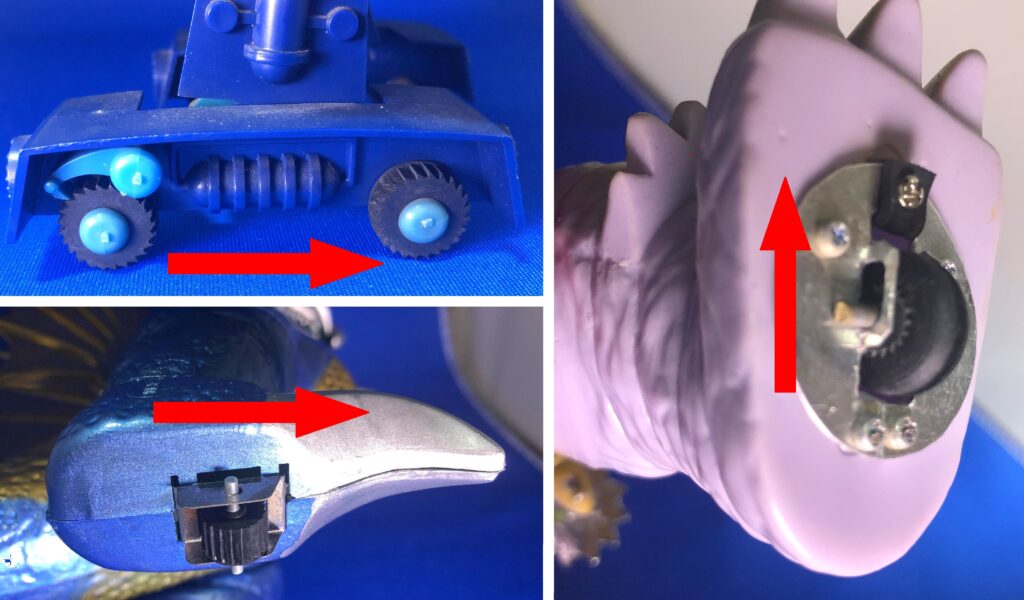
写真左上は前回紹介した「ダイナマイトロボ」の足で、矢印は進行方向を示します。ゴムローラーの上にあるストッパーは、ローラーの時計回りの回転を拘束しませんが、反時計回りの回転は拘束します。これにより、足がすり足で左右に動いているとき、矢印方向に足はスッと動きますが、反対方向にはローラーと地面の摩擦により足は動かず、反作用で身体が矢印方向に動きます。この繰り返しで、矢印方向に進むのです。左下はブルマァクのゼンマイプラモデル「ガイガン」の足裏ですが、これはストッパーのないタイプです。ローラーの軸が長穴に支持されており、足が矢印と反対方向に動くとローラーが矢印方向に移動し、金物と干渉して回転しないようになっています。これはブルマァクの怪獣に多く見られるタイプです。写真右は、今回紹介した「グロンケン」の足裏ですが、基本はこのブルマァクタイプを踏襲しながらも、ローラーの前方にゴムを配置することで、ローラーの溝切りを不要にした私のオリジナルです。
No.8 巨大魚怪獣ムルチ

今回は最高傑作との誉も高い第33話「怪獣使いと少年」に登場した巨大魚怪獣ムルチです。この話は、何と言っても佐久間良を演じた子役の名演技に尽きると思います。街で宇宙人と噂され迫害されている良が、土砂降りの中、食パンを買いに行き、「悪いけどよそへ行っておくれ」と店主の女に追い返されるシーンなど、何度見ても涙がこぼれそうになります。その後、走ってきたパン屋の娘が、「同情なんかじゃないわ。売ってあげるだけよ。だってうちパン屋だもん。」と言って良にパンを渡すのですが、子供番組としてまことに健全で、心打たれる名シーンになりました。
電動化の方は、マーミットのソフビ「2代目ムルチ」を使用しました。2代目は、「ウルトラマンA」に登場する怪獣のため、本プロジェクトにふさわしくないのかもしれませんが、ソフビとしての出来が非常に良かったため使用しました。
ムルチと言えば、あの悲しそうな鳴き声が特徴的です。ただ鳴かせるだけでは面白くないので、一定時間歩いた後、立ち止まって鳴き、それを繰り返すことにしました。一連の動きを機械的に制御するため、写真ー3に示す装置を自作しています。
なお、今回の歩行システムですが、足の裏から疑似足が出入りする、いわゆる「イマイ式」(前回記事参照)としています。

写真ー1 
写真ー2
写真ー3 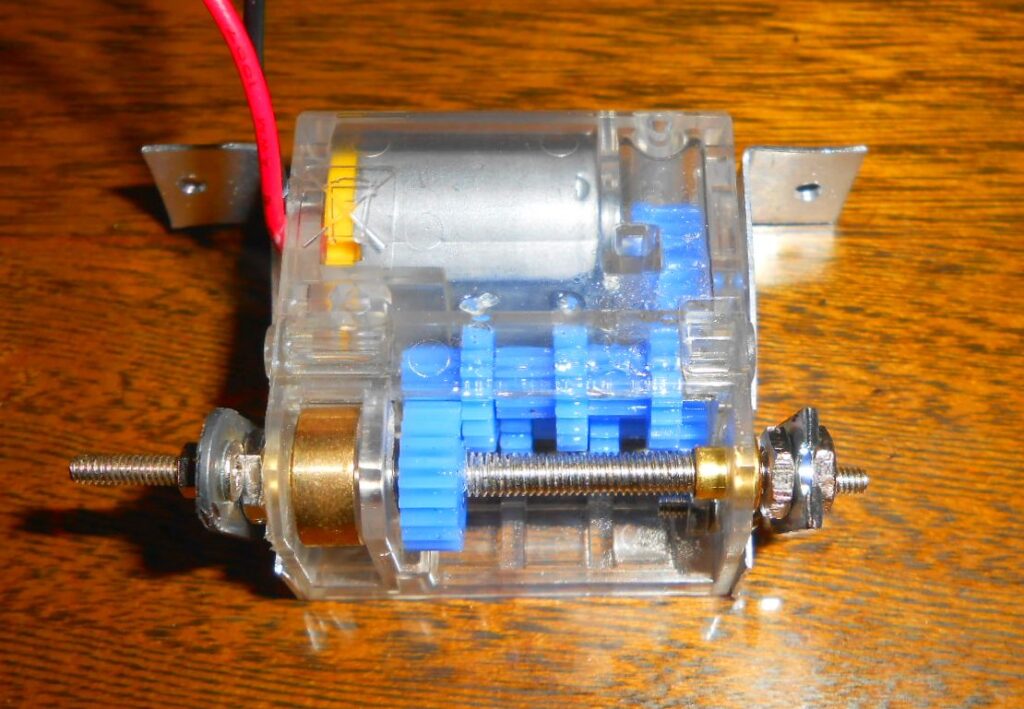
写真ー4

写真ー5 
写真ー6
写真ー1:着手前のソフビ
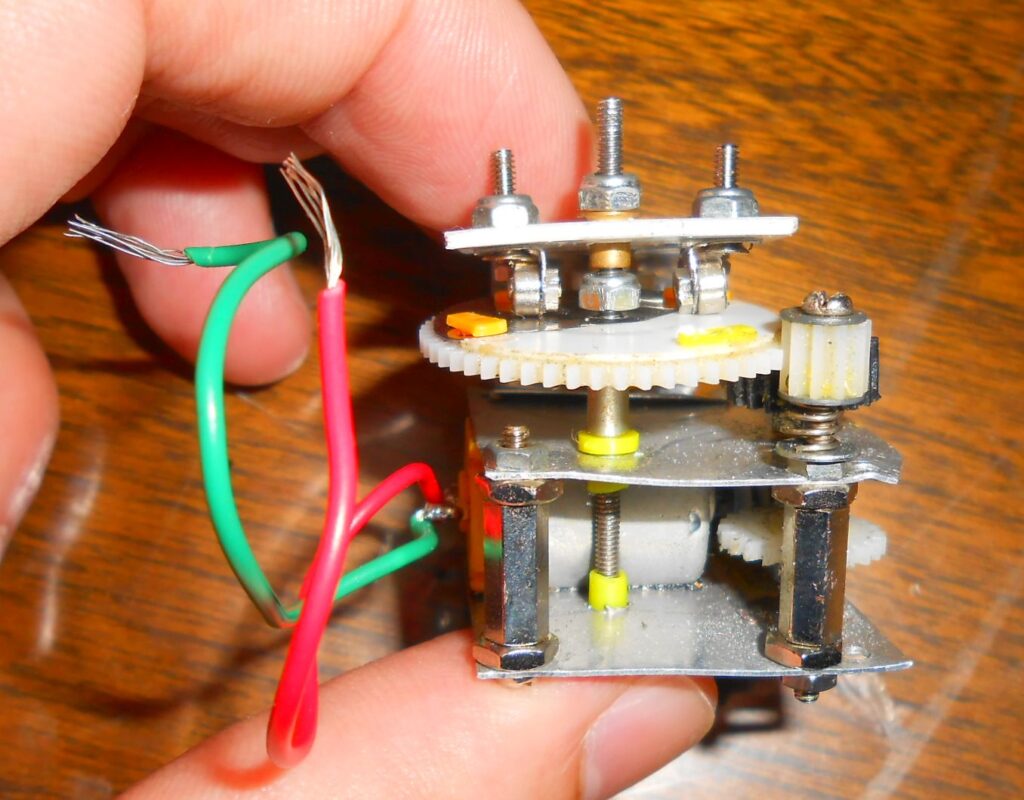
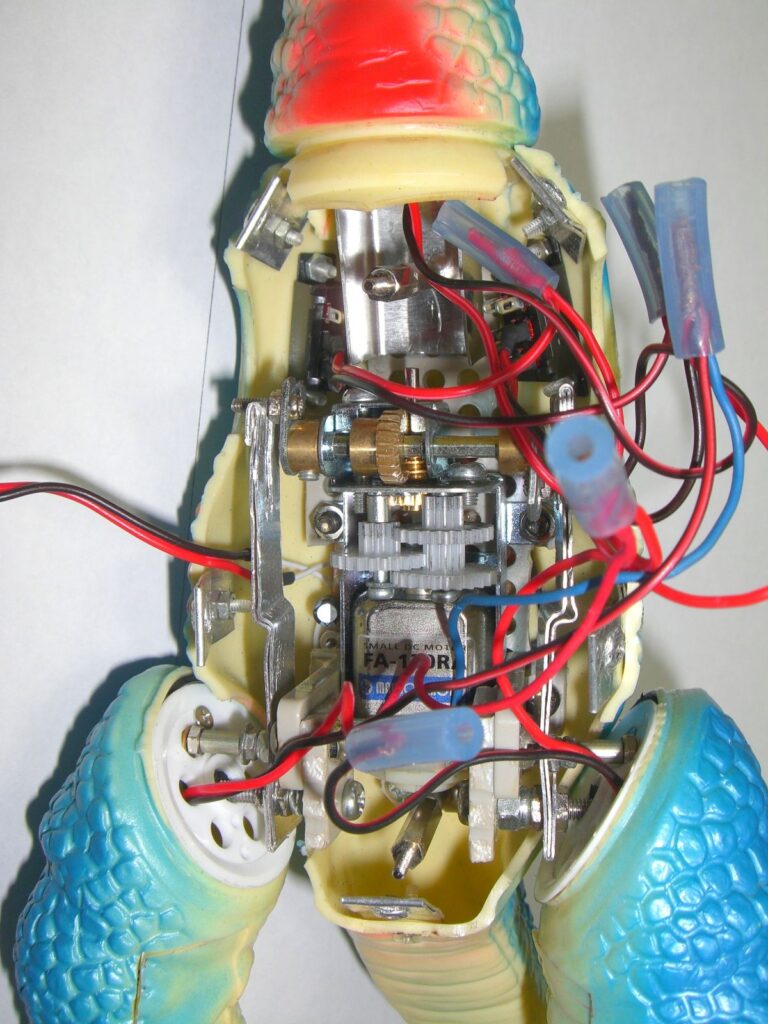
写真ー2:制御装置(上)とギヤボックス(下)を仕込んだところ
写真ー3:制御装置
中央の長い全ネジ棒は、回転する歯車の金属板に常に接触しています。左右にあるネジは金属製のローラーと繋がっており、ローラーが歯車の金属板と接触している間はONに、それ以外はOFFになります。
写真ー4:ギヤボックス(タミヤ「ミニモーター多段ギヤボックス」)
標準の出力シャフトは六角形の角鋼ですが、クランクに改良するため全ネジ棒に置きかえています。
写真ー5:完成後正面
写真ー6:完成後背面
今回、塗装をしていないのでネジが目立ってしまっています。
No.9 やどかり怪獣ヤドカリン

みなさんは、バンダイのプラモデル「やどかり」を知っていますか?ゼンマイで目玉をぴょこぴょこさせながら、くるくる走り回り、さらに貝殻を交換できるという優れたものでした。今回のヤドカリンはやどかり怪獣なので、この「やどかり」に負けない面白いものにしようと考えました。
結果、写真に示す通り、ヘンテコな台車に乗って走るシュールなものになりました。今回の特徴は次の通りです。
・自動で前後進を繰り返す。
・障害物に当たると、前進→後進、あるいは後進→前進に切り替わる。
・方向転換しながらジグザグに走る。
・以上をシングルモーター(駆動部はタミヤのユニバーサルギヤを一部改造)で行う。
・タミヤのドライブベルトを用いた一応、四輪駆動。
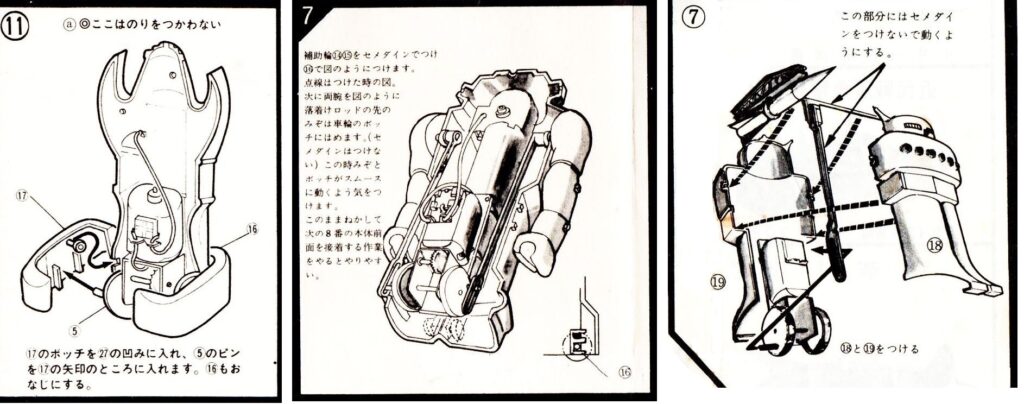
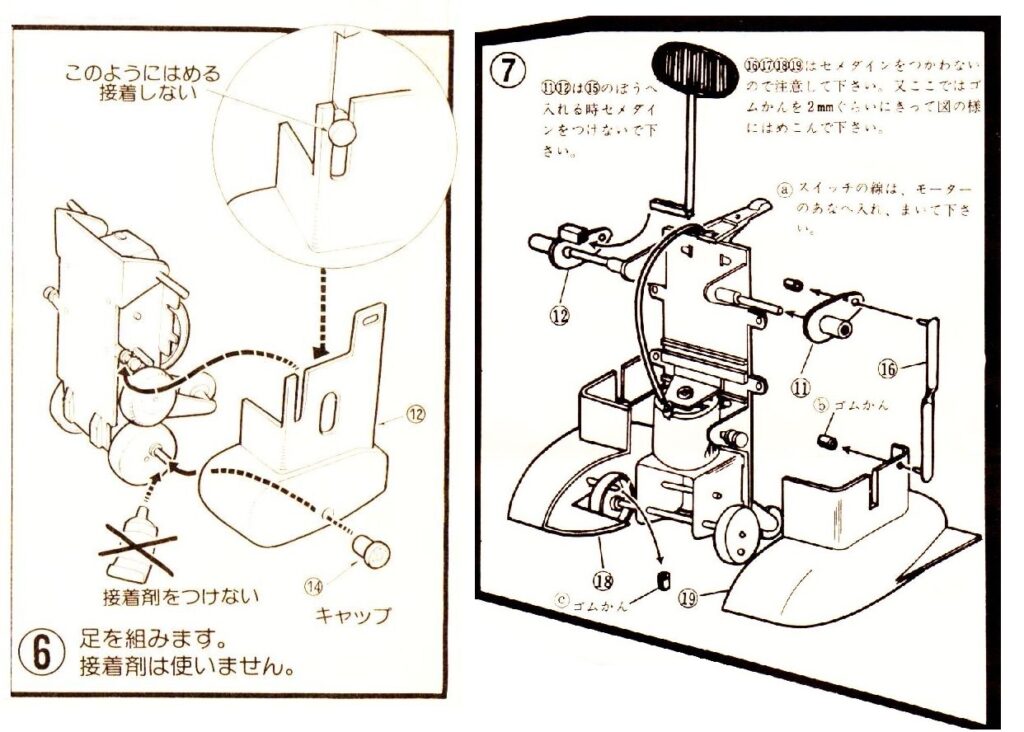
・鳴き声を再生できる。
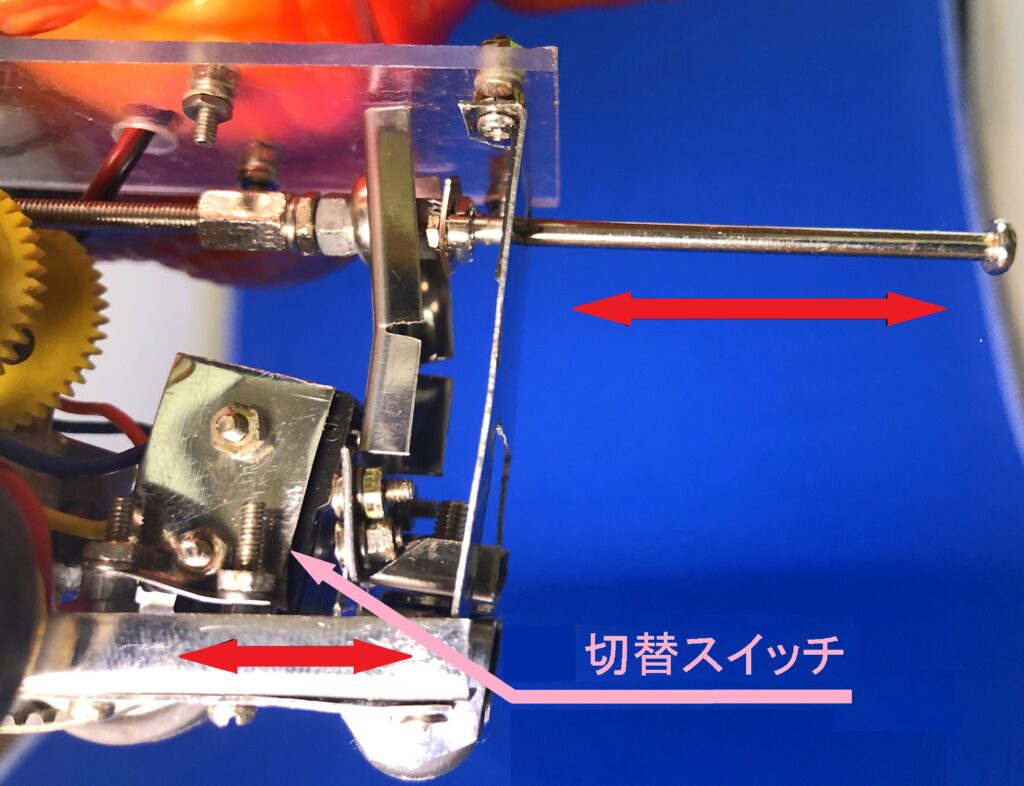
台車から水平方向に突き出ているロッドがスイッチを機械的に切り替えることで前後進を制御するため、各部品の取付位置の調整には苦労しました。また、方向転換用の鉛直方向ロッドを配置するため、ユニバーサルギヤの3mm出力シャフトを前方にスライドさせる必要があり、直交する2mm出力シャフトにウォームギヤをかぶせ、ドライブケースを前方にもうひとつ追加する処理を行っています。
なお、素材にはM1号製のソフビを使用しましたが、元々は2本足の直立スタイルだったものを正座させて台車上に乗せています。
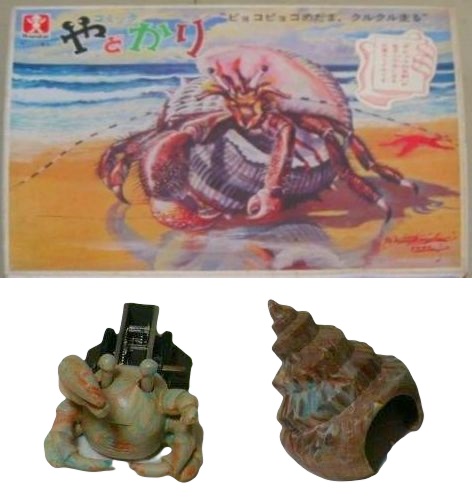
やどかり(ネットからの拾い画像) 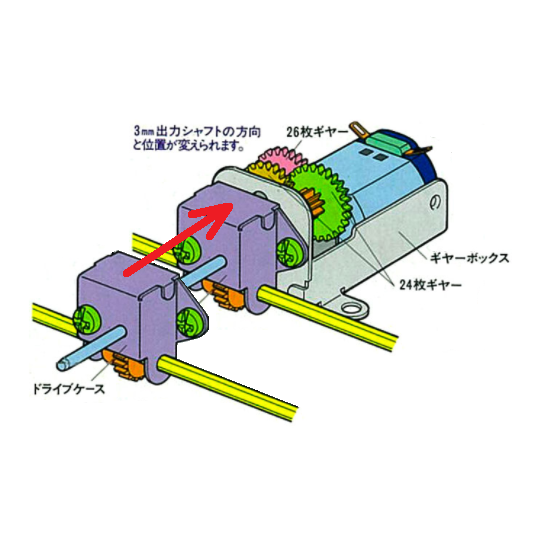
3mm出力シャフトスライドのイメージ
(タミヤHP掲載図を改変)

写真ー1 
写真ー2 
写真ー3
写真ー4 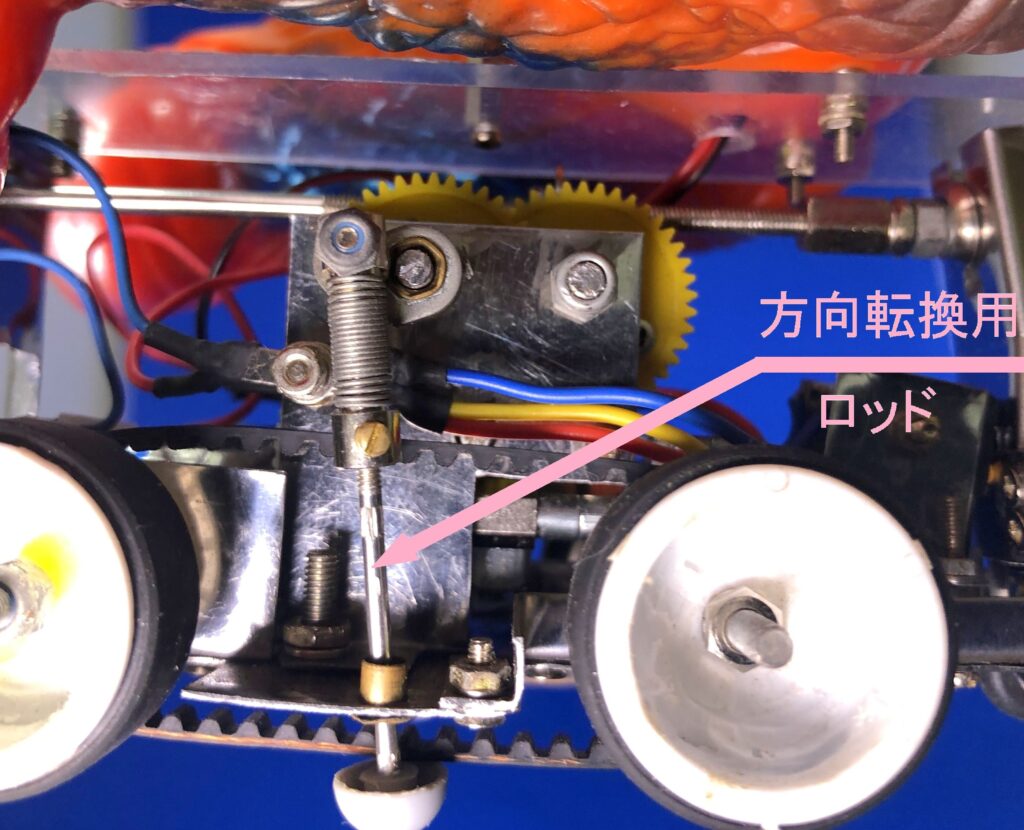
写真ー5

写真ー6 
写真ー7
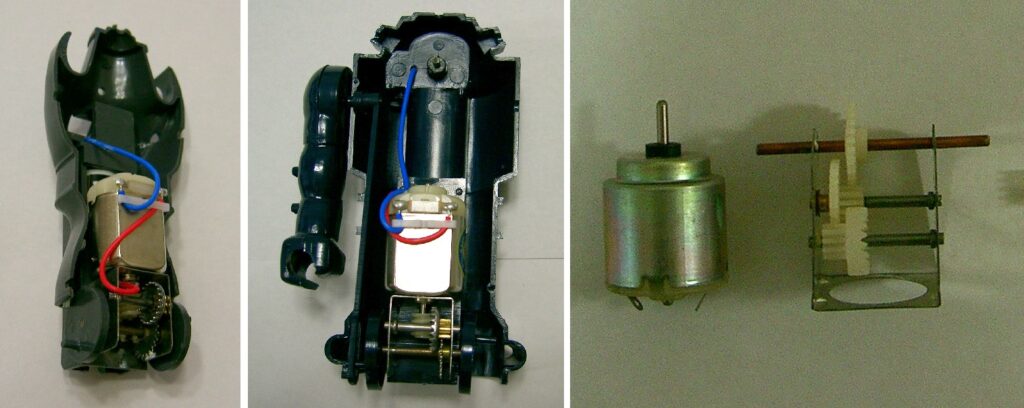
写真ー1:完成後正面
写真ー2:完成後背面
写真ー3:完成後右側面
写真ー4:ロッドの水平移動により、逆転スイッチのONーOFFが切り替わる。動いたロッドは磁石によって水平位置が保持される(移動中の振動でスイッチがONでもOFFでもない状態に緩むのを避ける)。
写真ー5:ユニバーサルギヤの上部に追加したクランクギヤにより、方向転換用ロッドが上下動する。
写真ー6:台車下面。3mm出力シャフトを前方にスライドさせるため追加したドライブケース内のウォームホイールが見える。
写真ー7:自動前後進の切替。回転する歯車に取り付けた突起①が、水平ロッドの円盤②を押すことでロッドが水平方向にスライドする。
No.10 怪獣総進撃

今回は、第1話「怪獣総進撃」に登場したタッコング、ザザーン、アーストロンの3体を紹介します。この第1話は、東宝の怪獣映画を数多く手がけた本多猪四郎監督の手によるものです。次郎が「怪獣が出た」と叫びながら帰宅し、すぐ家を飛び出していく。連れ戻すため次郎を追いかける郷。飼っている鳩を逃がすため団地屋上の鳩小屋へ急ぐ子供。これらのシーンは、ウルトラシリーズでは珍しい人間目線での怪獣出現を描いた緊迫感あふれるシーンになっています。また、打ち鳴らされる火の見櫓の半鐘と逃げ惑う村人のシーンは、本多監督の真骨頂とも言えるもので、怪獣映画に匹敵するその重厚な演出は視聴者の心を揺さぶり、帰ってきたウルトラマンという新番組を軌道に乗せることに成功したのでした。
それでは、順に怪獣を見ていきましょう。

①オイル怪獣タッコング
エクスプラス(X PLUS)製のソフビを使用しました。非常にリアルなソフビなので、外観を損なわずに歩行させるため、ぴょんぴょん飛んで移動する方式を採用しました。日本ホビーのスーパースプリングシリーズ「キジラ」、マルショウのノシノシウルトラマン怪獣シリーズが中国に流れたと考えられる中國福萬(福建)玩具有限公司(FUMAN)の「ピグモン」等のプラモデルを参考に、バネを使用したジャンプ機構を構築しました。
本物のタッコングとは異なる歩行スタイルですが、重量があるソフビをうまくジャンプさせることができたと思います。

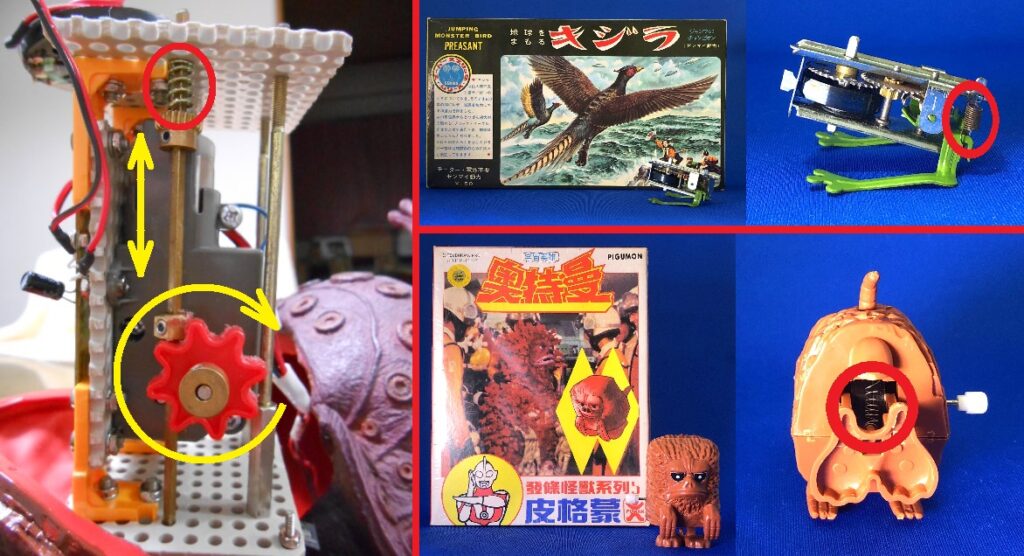
左:タッコングのジャンプ機構。回転するスプロケットにより鉛直ロッドに付いている突起を持ち上げ、上部バネ(赤囲み)を圧縮する。突起がスプロケットより外れると、バネ反力により勢いよくロッドが下方へプッシュされる仕組み。
右上:「キジラ」の上箱とゼンマイ。特殊な歯車で足を離散的に動かす工夫がなされている。
右下:「ピグモン」の上箱と足裏。現在でも安くで入手可能だが、ピグモンのプラモデルはこれしかなく、意外と面白い動きをするのでお買い得かと思います。

②ヘドロ怪獣ザザーン
CCP佐竹雅昭コレクションのソフビを使用しました。廉価で非常によく出来たソフビなのですが、身体がスリムなので大掛かりな駆動装置を組み込めないことから、思い切ってタミヤの水中ギヤボックスセットによる水陸両用仕様としました。基本は真っすぐに前進するだけですが、水中モーターを使用しているのでお風呂でも遊ぶことができます。水面を泳ぐことを想定し、歩行車輪に水かき用の羽根をつけていますが、推力が弱く進みません。水面に浮かばせるためには内部に発泡スチロール等の浮き材が必要と考えられます。



左:水中ギヤボックス、プーリー、ドライブベルトによるシンプルな歩行装置。
中:側面。頭頂部のスイッチをひねるとONーOFFが切り替わる。
右:背面。

③凶暴怪獣アーストロン
旧ブルマァクのソフビを使用しています。皮膚の表面仕上げなど良く出来たソフビですが、顔が可愛い過ぎるので、写真をスキャンしたリアルな目を張り付けています。歩行システムはいわゆるマルサン式ですが、胴体に嵌着されている両足の回転軸は一直線上になく、一軸のギヤでは歩行させることができません。このため、通常は足の胴体への取り付け角度を変える必要があり、「アーストロン」もガニ股になっています。なお、同プロジェクトの「グラナダス」では、足の取り付け角度をソフビから変えることなく、歩行させることに成功しています。そのメカニズムは、いずれ紹介したいと思います。
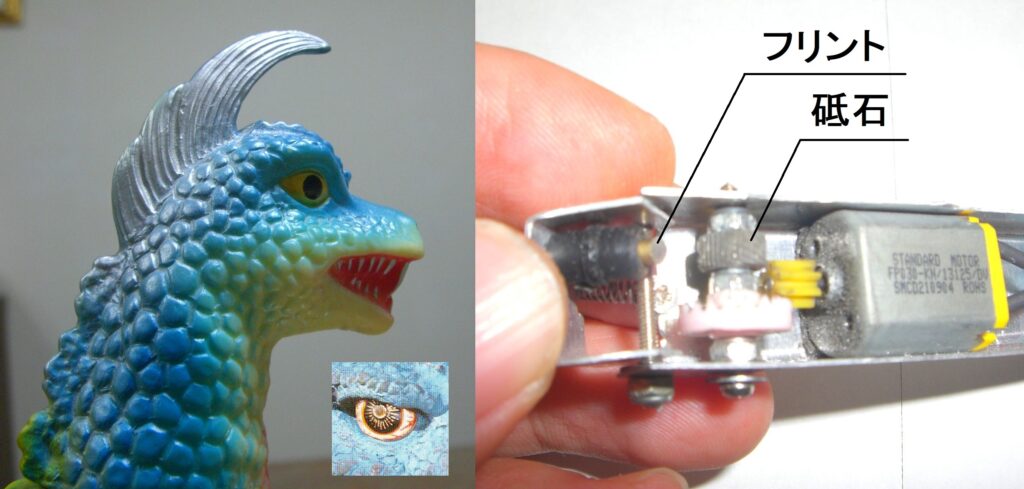
このアーストロンは、ミストスプレーにより口から炎に見立てたミストを発射させようと悪戦苦闘しましたが、給水タンクの水漏れの問題をどうしても解決することができずにあきらめました。仕方なく、ZIPPOのフリント(発火石)を用いた火花を口から発するようにしています。

左:オリジナルのソフビ。肌の質感が素晴らしい。
右:タミヤのユニバーサルギヤを仕込んだ状態。
左:ソフビオリジナルの顔と、実際の目(右下)。
右:発火装置。砥石は100円ライターをばらして取り出したもの。ZIPPOのフリントはタバコ屋等で購入。

左:完成後正面。足と胴体の間に部材を挿入し、足の取り付け角度を調整。左右脚回転軸の方向を一致させている。なお両足が電池BOXのため、下端に蓋の突起が見える。
右:完成後背面。
(教授のワンポイントアドバイス)
緑商会ロボットプラモデルの歩行システムについて説明します。
100円ロボットシリーズは、基本的にウォームギヤ+歯車2枚のギヤボックスで構成されています。ミサイルロボットは持っていないので未確認ですが、3体とも同じギヤボックスが使用されている可能性が高いです。何れもプラタイヤで走行します。
一方、(ヤング)タイガーロボは、ウォームギヤ+歯車3枚のギヤボックスで構成されています。ヨーデル製は、恐らくミドリと同じギヤボックスを使用しているはずです。モーターには円筒型のRE-14が使用されていますが、童友社版は角型のFA-13に変更されており、ギヤボックスも新規製作(または別プラモデルからの流用)かと思います。何れのメーカーでもプラタイヤが使用されています。説明図から、両手と両足、アンテナを動かす巧みなギミックが読み取れます。当ブログのソフビ電動化計画は、こうしたミドリの可動部をかなり参考にしています。
ガッツマン、ガイガーマンは、ゼンマイに直結したゴムタイヤで、ゴムタイヤに接するプラタイヤを回転させる珍しい機構が採用されています。このシリーズはプラタイヤが空回りするケースが多かったのか、プラタイヤにはめるゴムが後に追加されたようです。